
Heatblur DCS F-14 Tomcat — Heatblur F-14 Tomcat 1.0 documentation
© Copyright 2019, Heatblur Simulations
www.heatblur.se
DCS World, F-14 톰캣 Heatblur Manual 히트블러 메뉴얼
3-21 일반 설계와 체계의 개요
LANTIRN
목차
● General Design and Systems Overview
○ LANTIRN
● 일반 설계와 체계의 개요
○ LANTIRN
■ Description
■ 해설
LANTIRN, 야간 저고도 항법 및 적외선을 통한 목표 획득 장치 (Low Alititude Navigation and Targeting Infrared for Night)는 F-15E와 F-16을 위해 설계된 목표 획득 장치와 항법 포드의 조합으로 시작됐다. US 해군이 F-14 톰캣을 공대지 역할로 사용하는 것에 관심을 갖기 시작했을 때, Martin Marietta (현재 록히드 마틴)은 F-14용으로 LANTIRN을 재빠르게 적용시킬 수 있다는 것을 보여주기 위한 자체 계획을 진행했다.
F-14용으로 적용됨에 따라서 부차적인 항법 포드는 제거되었다. 표적 획득 포드만 유지되었다. 완전한 통합을 위해 필요한 1553-bus를 F-14가 가지지 못했기 때문에 포드는 자체 제어반에 연결되었다. 제어반은 TID와 VDI에 표시하기 위해 TCS 혹은 LANTIRN 둘 중 하나를 선택하는 것을 가능하게 하여 TCS → TID 영상 공급으로 덧씌워졌다.
포드가 경로점(waypoint)와 WCS에서 선택된 무장을 읽을 수 있지만, 포드는 자체 GPS 수신기를 가지고 그렇지 않은 경우에는 자체 제어반을 통해서만 독립적으로 제어된다. 추가로 자체 무장 투하 유도도 갖고 있어서 항공기에 포드를 정렬하는 시간 낭비 작업을 할 필요가 없다.
FLIR 감지기 자체는 세 개의 다른 시야(FOV) 확대 단계를 갖고 있다. 넓은 (Wide) FOV 한계는 5.9º이고 8.5º/초의 최대 회전 속도를 갖는다. 좁은 (Narrow) FOV 한계는 1.7º이고 1.8º/초의 최대 회전 속도를 갖는다. 마지막 모드, 확대된 FOV는 좁은 FOV의 디지털 방식의 확대로, 이 모드에서는 해상도가 안 좋아질 것이다. 이 FOV 한계는 0.8º이고, 최대 회전 속도는 0.7º/초이다.
■ Controls and Displays
■ 제어 장치와 화면
포드가 있을 때 LANTIRN의 모든 제어 장치들은 RIO의 왼쪽 제어반에 위치한 자체 제어반에 있다. TV 모드에서 TID와 VDI 화면에 표시할 영상을 제어하는 스위치가 포함되어있다.
LANTIRN 영상 원천들
LANTIRN으로부터 받는 FLIR (전방 시현 적외선) 영상은 승무원이 사용할 자료 정보에 덧씌워진다. 이 영상 자료는 FLIR 자료가 제어반에서 선택되었을 때 TID와 (TV 모드에서) VDI에 (마찬가지로 TV모드에서) 둘 모두에서 보여질 것이다.
다른 것들 중에서도 화면은 현재 항공기의 위치, 표적의 위치 그리고 승무원에게 보내는 표적화 신호를 보낸다. LANTIRN을 공대지로 사용할 때 이 정보값들은 표적 획득과 해제 신호로 사용된다.
자체 항공기 자료는 왼쪽 모서리 (1)에 보여지는데 위치, 고도, 대지 속도와 상하 기울기 각도 (dive)를 보여준다.
왼쪽은 (2) 포드가 흰색 열원 혹은 흑색 열원 (WHOT와 BHOT)를 사용하고 있는지, 자동 습득 제어 (Automatic Gain Control, AGC) 혹은 수동 습득 제어 (Manual Gain Control, MGC)가 사용 중인지를 보여준다.
왼쪽 하단 정보 영역은 (3) 포드 정보를 보여준다. SR은 목표까지의 직거리 (slant range)이고, AZ과 EL는 항공기 ADL과 비례하여 포드의 조준선 방위각과 고도이다. (AZ는 항공기의 진행 방향의 왼쪽 혹은 오른쪽임을 표시하기 위해 L 혹은 R로 나타낸다.) 아래에 있는 것은 현재 UTC 시간, 그 다음 아래에 있는 것은 IBIT 코드 (Initiated BIT, 운용자 자체 고장 진단)이다.
쪽지
IBIT 코드는 현재 미구현이고, 시계는 지역 시간을 보여줄 것이다.
중간 하단은 왼쪽에 (4) 현재 포드 모드 (A/A 혹은 A/G)와 추적 모드 (AREA, POINT or Q 지정)를 보여준다. 오른쪽은 현재 선택된 무장과 레이저 코드를 보여준다. 레이저가 무장되었을 때 위쪽 중간에 L이 나타나고, 이는 레이저가 발사될 때 점멸한다.
오른쪽 하단에는 (5) QSNO(Cue to snowplow), QADL(Cue to ADL) 그리고 QHUD(Cue to HUD)를 제외하고 현재 선택된 Q (slewpoint, 지정된 특정 위치)를 보여주고 TTG(Time to Go)는 현재 선택된 Q의 정상까지 가는 시간이 된다. 아래 열은 진로와 Q까지의 거리이며, ELEV는 피트 단위로 Q의 고도이고, 마지막으로 그 아래는 Q 위치이다.
6은 추적되는 위치를 보여주는 십자선이다. 이 경우에 우리는 감싸여진 상자를 갖는데 조준 지정 모드 (point mode)에서 현재 추적되는 표적을 나타낸다. 두 개의 가장 넓은 확대 모드 (widest zoome mode)는 그 다음 확대 모드와 가장 좁은 모드를 위한 FOV를 나타내는 상자를 갖게 될 것이다. (뭐라니?) 추가로, 아래를 보는 관점(top down perspective)에서 항공기에 비례하여 현재 포드 시야 근처에서 움직이는 작은 하얀 사각형 (FLIR 조준 신호)이 있다. 이 경우에 뒤집혀진 ^ 가 바로 옆, 최상단에 위치하고, 포드가 항공기의 전방을 바라보고 있음을 나타낸다. 만약 사각형이 중앙에 있다면 포드가 직선 아래를 보고 있고, 중앙 아래에 있다면 포드가 뒤를 보고 있음을 나타낸다.
(포드는 아래에 달려있어서 항공기 전방뿐 아니라 후방도 볼 수 있다. 항공기의 전방을 바라보고 있을 때는 뒤집혀진 ^ 기호가 바로 옆 상단에 표시되고, 사각형이 중앙에 있다면 포드는 전방 아래를 보고 있는 것이며, 중앙 아래에 포드가 있으면 포드가 뒤를 보고 있음을 나타낸다.)
마지막으로 7은 선택된 Q를 향한 조향 유도이다. 상단의 것은 진행 방향이고, 오른쪽에 수직선은 폭탄 투하 신호를 명령한다.
명령된 진행 방향은 현재 항공기의 진행 방향을 위에 반전된 ^ 표시로 보여준다. 선 아래에는 현재 항공기 진행 방향의 L (왼쪽) 혹은 R (오른쪽) 중 하나를 상대 방위로 나타낸다. 명령된 진행 방향은 또한 수평선에 이등분 된 수직선으로 표시하기도 한다.
오른쪽, 폭탄 투하 신호는 선택된 Q가 QDES이고, 투하 신호가 아래쪽으로 내려가는 수직선이 보일 때만 보여진다. 이 투하 신호는 오직 유효한 무장 선택(폭탄)의 경우에만 볼 수 있고, 두 개의 표시선에 도달할 때가 투하하라는 신호이다. 선 아래는 TREL (투하까지의 시간, Time to Release)를 초 단위로 보여주고, 투하한 뒤에는 TIMP (명중까지의 시간, Time to Impact)으로 바뀐다.
이 모든 것 주변에는 현재 항공기에 (항공기의 선체를 보아서) 어떤 각도에서 포드가 가려지는지 나타내는 차폐 곡선이 있다. 이는 FLIR 조준 신호와 관련되어 있다. 신호가 차폐 곡선 밖으로 움직일 때 감지기가 선체에 의해 가려질 것이다.
제어반
제어반은 조종간을 포함하여 포드의 모든 제어 장치들이 들어있다.
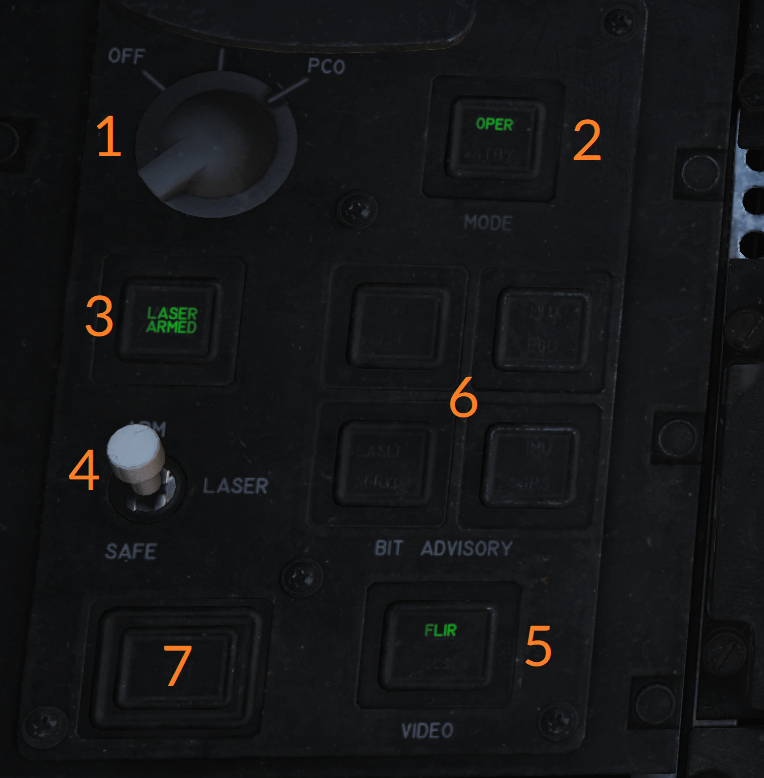
LANTIRN 포드의 전원 스위치는 왼쪽 최상단 (1)에 있고 OFF는 계통의 전원을 비활성화하고, IMU (위 사진에는 가려져있다.)는 LANTIRN IMU에만, 그리고 POD는 모든 체계에 전원을 공급한다.
쪽지
IMU 선택은 현재 DCS 기능에 없다.
MODE 스위치 (2)는 STBY (Standby, 예열)과 OPER (Operational, 운용) 사이에서 POD 감지기를 전환한다.
LASER ARMED (3) 조명은 LASER 스위치 (4)가 준비하는 동안 (ARM과 SAFE 위치를 이용할 수 있다.) 레이저가 준비될 때 불이 들어온다.
영상을 제어하는 오른쪽 아래 VIDEO 스위치 (5)는 TID와 VDI에 영상을 공급하는데, FLRI을 선택하면 LANTIRN FLIR 영상을 그리고 TCS를 선택하면 TCS 영상을 제공한다.
4개로 묶여있는 표시등 (6)은 LANTIRN 계통의 다양한 오류 상태를 나타내고, IBIT 단추 (7)은 IBIT (Initialized Built-In Test, 초기화된 내장 작동 시험)을 개시한다.
쪽지
IBIT와 결함 표시계는 현재 DCS에 구현되지 않았다.
조종간
LANTIRN 조종간은 LANTIRN의 감지기 자체를 운용한다. 조종간 자체는 움직이지 않음을 주의하고, 조종간의 단추와 모자 단추(hat)은 포드를 제어하는데 사용한다.
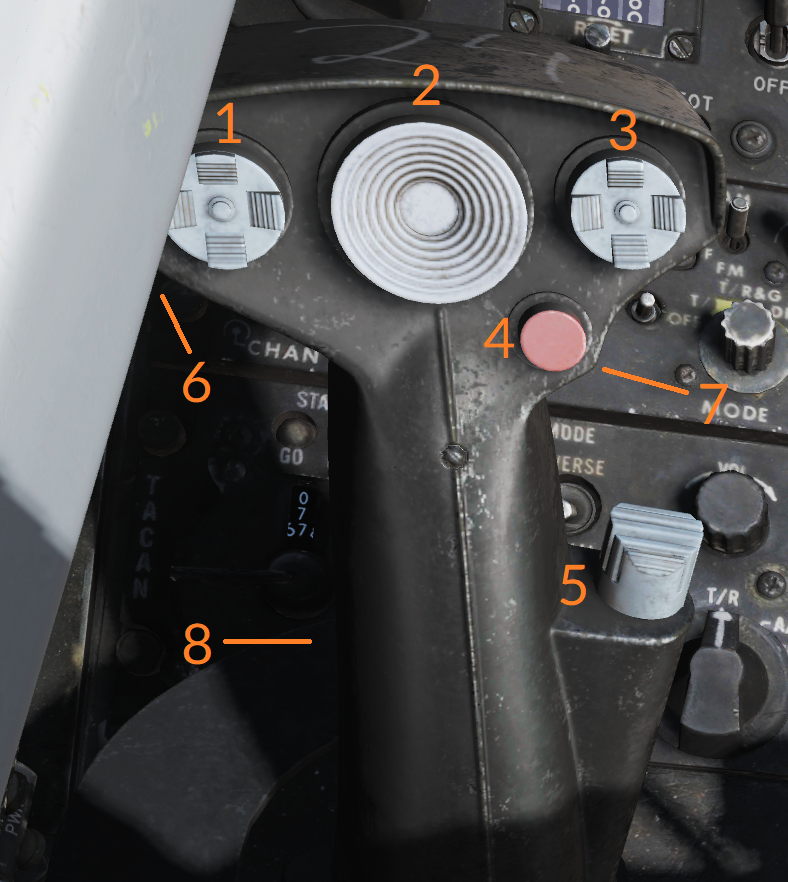
왼쪽의 네 방향 모자 단추, S3, (1)는 QWp- 와 QWp+ (왼쪽/오른쪽)과 추적 가르키기 (Point Track, 위로)과 영역 추적 (Area Track, 아래로) 모드의 선택을 할 수 있다.
중앙의 미끄러지는 모자 단추 (2)는 감지기 시야 자체를 움직이고, 이 모자 단추를 누르면 흰색 열원(White hot, WHOT)과 흑색 열원(Black hot, BHOT) 감지기 모드 사이에서 전환한다.
오른쪽의 네 방향 모자 단추, S4, (3)는 QADL/QHUD (위로), QDES (오른쪽), QSNO (아래)의 선택을 할 수 있고, 모자 단추를 누르는 것으로 화상 잡음 제거 단계를 순환할 수 있다. 왼쪽의 돌리는 조절 장치는 추가로 오른쪽 모자 단추 기능을 더 낮게 상세히 변경한다.
상단의 빨간 단추 (4)는 IR 감지기의 세 개의 시야 (확대 단계) 사이에서 순환한다.
옆쪽의 두 방향 모자 단추 (5)는 포드의 A/G 혹은 A/A 모드 운용을 선택한다.
조종간 머리 왼쪽에 위치한 것은 두 방향 돌리는 조절 장치 (6)로, 중앙으로 용수철 압력이 작용한다. 이 스위치는 오른쪽 네 방향 모자 단추의 기능을 바꾼다.
이것을 앞으로 돌리는 것은 수동 이득(Manual Gain)의 선택을 가능하게 하고, 이것을 해제했다가 다시 앞으로 돌리면 자동 이득(Automatic Gain)을 다시 선택한다. 이미 수동 이득이 선택된 상태에서 수동 이득의 변환은 스위치를 앞으로 돌리고 2초 동안 고정하는 것으로 가능하다. 이 모드에서 위/아래로 활성화하면 오른쪽 모자 단추는 이득이 증가하고 감소하는 반면 왼쪽/오른쪽은 정도(Level)를 감소하고 증가시킨다.
스위치를 잠깐동안 뒤로 돌리는 것은 사용된 레이저 암호(Laser Code)의 선택을 할 수 있는 반면에 뒤쪽으로 돌린 채 누르고 있으면 초점 제어를(Focus Control) 할 수 있다. 레이저 암호 설정을 변경할 때, 오른쪽 네 방향 모자 단추는 왼쪽/오른쪽으로 바꿀 숫자를 선택하고, 위/아래로 선택된 숫자를 증가하거나 감소시킬 수 있다. 초점 제어에서는 위/아래가 초점을 늘리거나 줄인다.
조종간 앞에 위치한 것(7)은 이단 방아쇠(Two-stage Trigger)이다. 첫 멈춤쇠는 수동으로 레이저를 쏘고, 두 번째 멈춤쇠는 레이저를 발사하고 QDES를 현재 감지기 위치로 지정한다.
마지막으로 조종간 앞 측면에 있는 것(8)은 잠겨진 레이저 발사 단추이다. 이것을 선택하면 레이저를 60초 동안 발사하고, 첫 번째 방아쇠 멈춤쇠를 누르고 놓는 것으로 이를 중단시킬 수 있다. 레이저 잠금 단추을 다시 누르는 것은 잠겨진 레이저 발사 시간을 60초로 재설정하고, 새로운 60초 초읽기를 시작한다.
■ Operation
■ 운용
시동
LANTIRN을 정지 상태에서 시작하기 위해서는 전원 스위치를 POD로 설정한다. 이것은 8분이 걸리는 LANTIRN의 작동 시작 절차를 시작할 것이다. 준비가 되면 MODE 스위치가 STBY를 보여줄 것이다.
STBY일 때, MODE 단추를 누르는 것은 체계를 OPER (Operational, 운용)로 전환하고, 30초 초기 설정 후에 LANTIRN 감지기가 활성화된다.
마지막으로, LANTIRN FLIR 영상의 표시를 하기 위해서는 VIDEO 스위치에 FLIR을 선택한다.
감지기 모드와 운용
LANTIRN은 두 개의 '주요'모드를 갖는데 A/A와 A/G이다. 둘 모두 비슷하게 작동하지만 다른 표적 유형에 최적화되어있다. 추가로 A/G 모드는 폭탄 투하 유도를 할 수 있다.
포드는 감지기 시야를 제어하는 두 개의 주요 방법이 있는데, 대비 락 (Contrast Lock, 그림을 따라가는) 혹은 Q 지정에 사역되는 것 중 하나이다.
영역(Area)과 목표 지정(Point) 추적 모드는 LANTIRN이 LANTIRN FLIR 영상 자체에서 대비 차이에 락을 하는 두 개의 대비 락 모드이다. 이것은 그 자체가 현재 항공기 위치와 포드 시야와 계산된 표적 위치를 사용하여 정확하지 않은 거리 측정을 해주는 각 추적(angle tracking)만 할 수 있다. 하지만 이는 체계가 움직이는 표적을 추적할 수 있게 한다.
마지막 추적 모드는 Q로 불리는 저장된 위치/방향으로 움직이는 감지기를 가진다. 방향 Q들은 위치 안내를 할 수 없지만 위치 Q들은 그렇게 할 수 있다.
QSNO와 QADL/QHUD는 방향성이고, QSNO는 감지기를 현재 항공기 진행 방향을 따라서 항공기의 앞 지상 15 NM에 직접 종속시킨다. QADL과 QHUD는 감지기를 (A/A에서) ADL에 종속시키거나 혹은 (A/G에서) HUD의 항공기 날개 기호에 종속시킨다.
위치 Q들은 두 개의 근원을 가진다. 조종간 왼쪽 모자 단추에 있는 QWp-와 QWp+는 WCS 중간 지점(Waypoint)을 순환하기 위해 사용할 수 있는데 RIO가 항법과 표적 위치를 알아내기 위해 다른 중간 지점으로 움직이게 할 수 있다.
다른 근원은 포드 지정을 통하는 것이다. LANTIRN 방아쇠 두 번째 멈춤쇠 선택으로 현재 감지기 추적 혹은 위치에 레이저가 발사되고, 그 자료를 사용하여 저장된 새로운 위치가 된다. 이는 QDES로 불리고 교전을 위해 표적을 지정하는데 쓸 수 있으며 RIO가 비행 중 항법 참고를 위해 새로운 위치를 선택할 수 있게 한다. QDES는 자동으로 WCS로 전환되지 못하지만, RIO는 포드 영상 공급에서 표적 위치 정보를 사용하여 수동으로 그것에 들어갈 수 있다.
오른쪽 하단 정보 영역 (datablock)은 위치 Q에 대해서만 활성화되지만 영역 혹은 목표 지정 추적 모드에서 포드가 움직여질 때도 남아있을 것이다. 하지만 다른 Q가 선택되자마자 이것은 그 위치로 대신 최신화 될 것이고 만약 방향성 Q가 선택된다면 지워질 것이다.
A/G Target Engagement and Designation
A/G 표적 교전과 지정
[QDES = Que to designate]
지상 표적 교전을 위한 LANTIRN 조향 신호(Steering Cues)는 LANTIRN이 QDES으로 돌아가거나 새로운 QDES가 지정될 때 자동으로 활성화된다. QDES 자체는 새로운 Q가 선택되어도 그것이 존재하는 한 남아있을 것이다. 조향 신호는 LANTIRN이 다른 지점으로 움직이더라도 QDES를 향해 가르킬 것이다. 조향 명령이 QDES 대신에 현재 감지기의 위치를 향한다고 생각하기 쉽다는 것을 명심하는 것이 중요하다.
하지만 레이저 지정 자체는 레이저가 항상 현재 추적을 가르키기 때문에 QDES와 다른 장소를 가르키는 것이 가능하다. 이는 원한다면 QDES로 표시된 표적으로 빠르게 복귀하기 위해 사용된다는 것이고, 움직이는 표적에 레이저를 쏠 때는 QDES를 타격 시 예상 목표 위치에 설정해야 한다. (수동으로 추정) 그 다음 조준 지정 모드 혹은 수동 움직임으로 더 정밀하게 실제 표적을 지정할 수 있다.
레이저 암호를 바꾸기 위해, 조종간 왼쪽의 돌림장치를 뒤로 밀었다가 놓는다. 이는 오른쪽 모자 단추 (S4)를 레이저 암호 모드로 바꿀 것이다. 현재 선택된 숫자는 비워지고 S4 모자 단추로 숫자를 설정할 수 있다. 왼쪽/오른쪽은 설정할 숫자를 바꿀 수 있고, 위/아래는 숫자의 값을 바꿀 수 있다. 왼쪽 돌림장치를 뒤로 선택하는 것을 반복하면 레이저 암호 모드를 종료할 수 있다.
레이저 모드 동안에서 S4, 오른쪽 모자 단추를 누른다면 자동 레이저 모드가 활성화되고, 숫자의 왼쪽에서 M(수동) 문자가 A(자동)으로 바뀐다. 수동 모드로 되돌아가기 위해서는 똑같이 반복하면 된다. 자동 레이저 발사(Autolase) 모드는 10초 TIMP에서 시작하여 TIMP zero + 4초까지 레이저를 발사한다.
폭탄 투하 신호는 유효한 무장이 선택될 때만 보여질 것이고, 선택된 폭탄은 RIO 무장 제어반에서 WCS를 통해 무장 선택 장치 바퀴에서 확인할 수 있다. 실제 폭탄 투하는 컴퓨터 조종사나 컴퓨터 표적 모드를 수행할 수 있지만, 수동 모드가 권장된다. 수동 모드에서는 조종사가 VDI에 표시되는 LANTIRN 영상의 신호를 따르며 LANTIRN으로 신호를 받을 때 폭탄을 투하한다.