
Heatblur DCS F-14 Tomcat — Heatblur F-14 Tomcat 1.0 documentation
© Copyright 2019, Heatblur Simulations
www.heatblur.se
DCS World, F-14 톰캣 Heatblur Manual 히트블러 메뉴얼
3-25 일반 설계와 체계의 개요
항법 ③
목차
● General Design and Systems Overview
○ Navigation
■ INS Alignment Modes
● 일반 설계와 체계의 개요
○ 항법
■ INS 정렬 모드
INS를 항법에 쓰기 전에, 관성 플랫폼은 항공기 기준 수직 방향과 수평 상태로 정렬되어야 하고, 진북 방향을 유지해야 한다. 이것은 거친 정렬 (coarse alignment)와 정밀 정렬 (fine alignment), 두 개의 단계로 자동으로 완료된다.
거친 단계는 초기 설정 차례가 완성될 때 시작하고, IMU 플랫폼 방랑 각도 (wander angle)에 대한 초기 거친 평가를 수행한다. 이 단계를 성공적으로 완료하고, 정밀 정렬 단계로 진행하기 위해서 IMU 플랫폼에서 항공기 기준 수평 오류 최소화가 필요하다.
예열을 위해 필요한 IMU 요소들은 IMU 난방기로 열을 올리는 것이다. 추가로, IMU 짐벌 (좌우 기울기 roll, 상하 기울기 pitch, 방위각 azimuth)은 각각의 동시 작동 (synchro)을 통해 IMU 용기 (항공기 기체를 기준으로 하는 참조, airframe Reference) 에 한정되어진다. (IMU Gimbals are caged.) IMU 회전의 (Gyro)들은 비행 속도(Running)까지 끌어올려지고, 가속도계 출력값을 사용하여 거친 평행화가 수행된다.
동력이 NPS와 IMU에 공급될 때, 대량 저장 테이프(Bulg Storage Tape)에서 WCS 컴퓨터의 쓰기 보호 되지 않은 저장 장치 (Nonwrite-Protected Memory)로 SMAL 프로그램이 읽힌다. 정렬 프로그램은 방랑 각도(Wander Angle), 초속 오차(Velocity Error), 그리고 회전의-회전 정정 신호 (Gyro-Torquing Correction Signals)를 평가한다.
이러한 값들은 CSDC로 보내져서 IMU를 정렬하고, CSDC NAV 프로그램을 초기 설정하한다. 다음의 어셈블리(Assemblies)는 정렬 중에 사용된다: IMU, NPS, CSDC, WCS 컴퓨터, CAP (컴퓨터 주소판, Computer Address Panel), 항법 제어 장치와 자료 읽기판 (Navigation Control and Data Readout Panel). 항공 모함 정렬을 위해서는 데이터 링크 수신 처리기 (Data Link Receiveer-Processor)도 사용된다.
정렬 모드는 주로 네 개가 있다.
SAT (정렬 및 테스트 동시 진행, Simultaneous Alignment and Test) 지상과 항공모함 정렬
NON SAT 지상과 항공 모함 정렬
SAT 운용은 정렬 중에 OBC 작동 시험를 허용한다. SAT 혹은 NON SAT에서 어느 정렬 모드든 사용할 수 있다. (SAT 모드는 DCS에 아직 구현되지 않았다.)
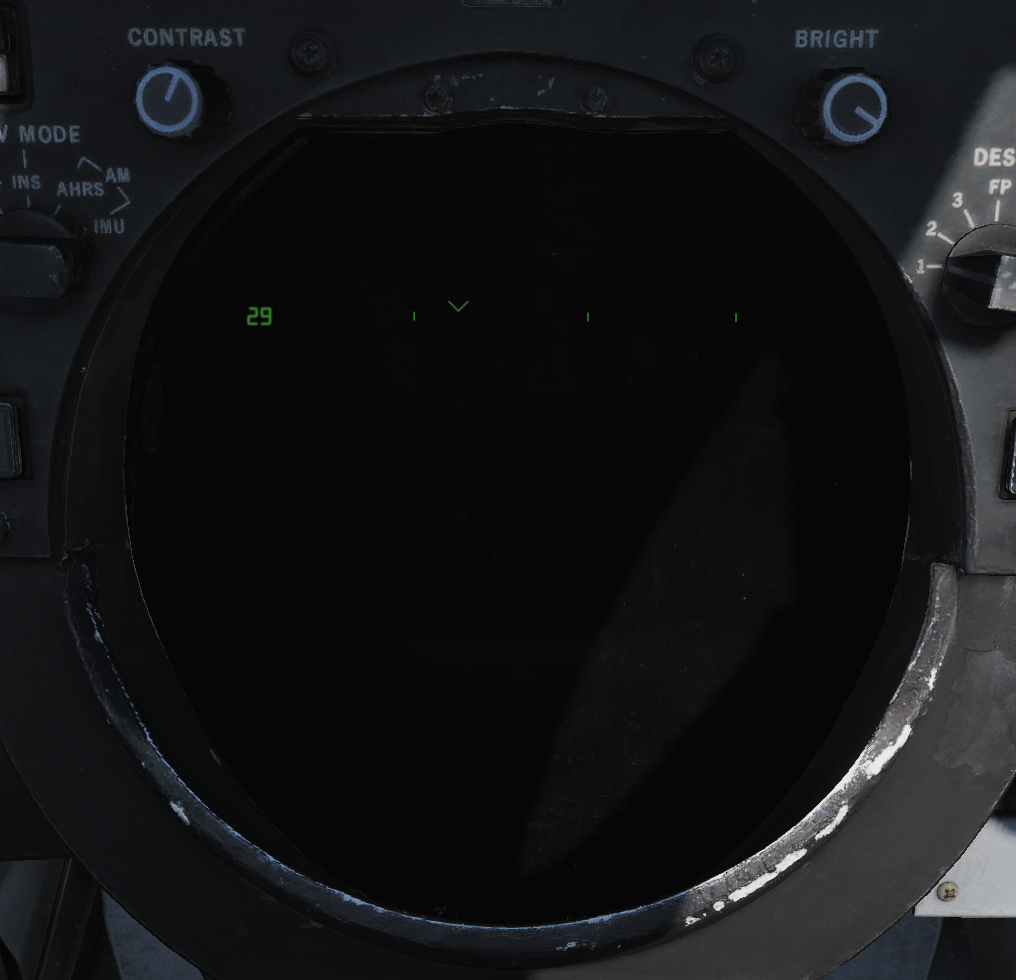
기본 TID 화면 구성 방식은 아래의 사진을 따른다. 자동 수행 절차는 데이터 링크로 배의 흔들림이 삽입되는 CVA ALIGN을 제외하면 모든 모드에서 똑같다.
CAT ALIGN는 주차 브레이크가 켜져 있어야 하는 요구를 무시한다 (정지 정렬). 정렬 부가 모드 두 개가 더 있는데: 저장된 진행 방향과 handset이다. 핸드셋 모드는 SINS 자료를 이용할 수 없을 때 CVA ALIGN를 위해 사용된다. 저장된 진행 방향은 신속한 정렬로, 이전 정렬 (참조 정렬)을 사용하여 체계를 빠르게 정렬하기 위해 사용된다.
어떤 정렬 모드의 초기 설정이든 다음 값들을 현재 항공기나 HB (본거지)에 다음과 같은 입력이 필요하다.
1. 위도 (Latitude)
2. 경도 (Longitude)
3. 보정된 기압 고도 (Corrected Pressure Altitude)
게다가, 핸드셋 정렬이 항공모함에서 사용된다면 다음의 값들도 반드시 입력되어야 한다.
1. 속도 (Speed)
2. 배의 진방위 (True Heading)
쪽지
주차 브레이크는 어느 정렬이든 초기 설정 동안에는 켜져 있어야 한다. 주차 브레이크가 거친 정렬 동안 풀려있을 때, STBY와 READY 조명이 반짝이고 정렬 프로그램 초기 설정이 다시 시작될 것이다. 주차 브레이크가 정밀 정렬 중에 풀린다면, CSDC로 정지 정렬 신호가 전송되고 STBY 혹은 READY 등화가 깜빡이며 TID의 정렬 시간이 멈춘다.
비-SAT 정렬
Ground Alignment
지상 정렬
지상 기지 운용에서, 지상 정렬 절차는 IMU 정렬을 위해 사용한다. 항공기 혹은 지상 기지 위도, 경도, 그리고 고도는 CAP로 WCS 컴퓨터에 입력된다. 이는 GND 정렬을 선택하기 전 혹은 후에 완료될 것이다. NAV MODE 스위치를 GND ALIGN 선택하면 정렬이 가동될 것이다. 하지만 ALIGN으로 전환할 때 걸린 것(hooked)은 무엇이든지 자신의 좌표로 주입될 수 있음에 주의해야 한다. 예를 들어, 지상 기지 혹은 사전 설정된 현재 항공기의 좌표를 사용할 수 있지만, 사용자가 입력하지 않았을 경우 90초에서 120초 사이에 자신의 현재 좌표를 입력할 시간이 주어지고 정렬이 끝나는 것을 기다릴 수 없다. 혹은 이는 식별할 수 있는 오류 (O)가 촉발될 것이고 정렬은 재시작해야 할 것이다.
쪽지
정밀 정렬이 이뤄지지 않는다면, 현재 항공기의 위도 입력은 정렬을 다시 시작할 것이다. 정렬 프로그램 데이터 판독 (read-in)이 완료되면, TID 상에 정렬 화면이 나타난다. (위 사진을 참고.)
초기화 동안, TID는 0.7의 정렬 시간을 보여줄 것이다. 42초에서 45초 후에 주의/경고반에 NAV COMP 등화이 꺼지며 IMU가 준비 상태에 들어갔음을 나타낸다. READY 등화 또한 꺼진다. 정렬 프로그램은 정렬 매개 변수의 계산을 시작할 것이다.
이 때에 교정 부호(v)로 불리는 정렬 상태 지시계가 왼쪽에서 오른쪽으로 움직이기 시작할 것이다. 정렬 상태는 이 부호가 세 개의 정렬 표시점과 관련하여 나타나는 위치에 따라 표시된다. 첫 번째 표시점 지시계는 거친 정렬 완료 표지(coarse-align complete marker)로 불린다. 두 번째는 경보 발사 기준 표지(Alert Launch Criteria Maker)이다. 세 번째 지시계는 정밀 정렬 완료 표지이다. 경과 시간 지시계는 분과 10분 단위로 정렬 시간을 제공한다.
시계 지시계는 0.7로 표시되어 시작할 것이고 42초 지연 후에 계속될 것이다. 9.9분 후에, 시계는 0을 넘어갈 것이고, 다시 시작될 것이다. 정렬이 유예된다면 (주차 브레이크), 시계는 정렬이 다시 시작될 때까지 세는 것을 멈출 것이다.
첫 번째와 두 번째 표시점(tick) 사이는 네 개의 체계 중 하나의 결함을 나타내는 상태 표시기 (telltale status indicator)이다. C = 보정 자료 (calibration data) 결함, T = 온도 (차가운 IMU), S = SINS (함 관성 항법 체계, Ship Inertial Navigation System) 자료 인식 불가, 그리고 O = 관측 가능한 (정렬 자료 불량, 즉 LAT, LONG, SPEED, 등등). 나타나는 글자는 결함을 가진 체계를 표시한다.
A C 는 IMU와 CSDC 사이에서 보정 자료의 전환에 결함이 있음을 나타내고, 정렬은 진행되지 않을 것이다.
T는 기본적으로 정렬 시작할 때 나타나고 IMU가 운용 온도에 도달할 때 사라진다. 만약 T가 사라지지 않는다면, 체계에 결함이 있는 것이고 저장되지 않은 기수 방향 (a non-stored heading) 정렬이 진행되지 않을 것이다.
S는 어떤 CV (항공모함)에서든 시작할 때 나타날 수 있고 금세 사라질 것이다. 만약 S가 사라지지 않는다면, 결함이 있는 것이고 불량한 정렬이 될 것이다. S는 또한 SINS 자료가 유효하지 않은 경우에도 표시되며 이 경우에는 정렬을 신뢰해서는 안 된다.
쪽지
● CSDC와 IMU 출력값들과 입력값들은 지속적으로 관찰되고, X 혹은 Y 가속도에서 과도한 값이 감지되거나 틀린 경도나 위도 자료 입력으로 불량한 값이 감지되면, TID에 O (비정상 관측)이 표시되고 정렬이 중단된다.
● IMU는 지상 혹은 항공기 전원으로 운용할 때 TID NAV MODE 스위치에서 IMU/AM을 선택하면 예열될 것이다. 이것은 IMU와 항법 전원 공급에 동력을 공급하고, 지상 혹은 항공모함 정렬 시작에 앞서 IMU 가열기를 켠다. IMU는 5분보다 길게 예열해서는 안 된다.
거친 정렬 동안에, 정렬 상태 지시계는 방랑 각도 오차 (Wander Angle off, 기수 방향과 진북 사이의 각도 오차)에 따라 움직인다. 이 단계에서 주차 브레이크가 풀려있다면, 정렬은 초기화될 것이다.
거친 정렬이 완료될 때 'V'는 첫 번째 표지에 도달할 것이다. 프로그램이 정밀 정렬로 전환될 때, 정렬 상태 지시계는 마름모꼴(◇)로 바뀐다. 이것은 OBC가 완료된 경우 조종사에게 주차 브레이크를 풀고 장내 이동(taxi) 할 수 있음을 나타낸다. 주차 브레이크를 다시 설정한 후에 정렬은 계속될 것이고, 마름모꼴은 정렬 향상에 따라 오른쪽으로 움직일 것이다.
정렬이 무장 발사의 최소 기준에 도달했음을 나타내는 두 번째 표지에서는 STBY 등화가 꺼지고, READY 등화가 켜질 것이다. 이때 INS 모드를 입력할 수 있다. INS가 선택되지 않는다면 마름모꼴은 계속해서 오른쪽으로 이동한다. 세 번째 표지에 닿을 때는 정밀 정렬이 완료됐음을 나타내고, 마름모꼴에 (< >) 점이 나타날 것이다.
정밀 정렬이 완료된 이후에도 체계를 정렬 모드로 놔둘 수 있다. 이는 계속해서 더 정확한 정렬을 제공할 것이다. 얼마나 더 정확성을 획득할 수 있는지는 정밀 정렬이 완료되었을 때 정렬의 질에 따른다. 몇몇 경우에 따라 작을 수 있지만, 충분히 오랫동안 정렬에 놔두면 항상 어느 정도의 개선을 제공한다.
쪽지
정렬이 중지되고, 항공기가 4천 피트보다 멀리 장내 이동을 하게 된다면, 정렬의 질이 신뢰할 수 없을 정도로 알 수 없게 된다. 정렬을 다시 초기화하는 것이 권장된다.
만약 교정 부호 모양(V) 혹은 마름모꼴이 움직임을 멈춘다면, 프로그램을 멈춘다. 첫 번째와 세 번째 표지(거친과 정밀) 사이에서 멈춘다면, 정렬이 중지되었음을 의미한다. 이런 경우에 시계는 세는 것을 멈출 것이다. 만약 정렬이 계속된다면, 시계는 NAV MODE 스위치를 정렬에서 전환해서 나가거나 주차 브레이크가 다시 풀릴 때까지 세는 것을 재개할 것이다.
쪽지
정렬 화면은 IMU 온도가 165º에 도달할 때까지 거친 정렬 표지로 지나가지 않을 것이다. 이 온도에 도달할 때, T 기호가 사라질 것이다. 온도 Interlock은 저장된 진행 방향 정렬 수행할 때 우회될 것이다. IMU는 저장된 진행 방향 정렬을 위해서 예열되어야만 하고, 이것은 보통 2분 안에 완료되며 불량 정렬을 초래할 수 있다.
INS를 선택하는 것은 READY 등화를 끌 것이고, 정렬을 끝내고 전술 화면(Tactical Display)을 보여주고, 일반 항법 화면을 이용 가능하게 될 것이다.
쪽지
● NAV MODE 스위치가 INS로 설정되어 있을 때, CSDC는 항법 모드에 있고 READY 등화가 꺼진다.
● INS 항법 모드를 선택한 후에, AWG-9 정렬 프로그램은 거의 세 개의 정렬 자료 순환 (18초)을 INS를 입력하기 전에 계속한다. 이것은 또한 INS 선택하기 전에 항공기가 이륙해도 적용한다.
그 후 RIO와 조종사는 TID 혹은 TID 반복 (repeat) 화면에서 자세 상태 판독값에 IN 두문자를 관찰할 수 있다.
정밀 정렬 도중 두문자어가 보일 때 정렬 재초기화를 원한다면, 혹은 정렬이 정지되지 않았다면, 아래의 방법을 이용해 볼 수 있다.
1. INS 모드 스위치와 WCS PWR 스위치로 OFF를 선택한다. TID 화면이 꺼지게한다. 보통 시작 절차 수행을 진행한다.
2. INS 모드를 원하는 정렬 모드로 전환한다.
3. INS 모드를 INS로 전환한다. INS에서 체계를 확인하고, (TID에 IN 두문자어) 순환 모드 (Cycle Mode)를 off로 전환한 다음 원하는 정렬 모드로 되돌린다.
정밀 정렬을 재초기화할 때 위 절차 수행을 따르것에 실패하는 것은 심각하게 저하된 정렬 품질을 초래할 것이다. 프로그램을 거친 정렬 동안에 재초기화하기 위해서, RIO는 GND ALIGN을 선택하지 말아야 한다. LAT와 LONG를 다시 입력하고 GND ALIGN을 다시 선택해야 한다.
항공모함 정렬
위도, 경도와 기수 진행 방향이 변하는 항공모함 위에서 정렬할 때, 항공모함 정렬 절차가 사용된다. INS는 항공모함에서 세 가지의 다른 방법으로 정렬된다. RF 데이터 링크 정렬과 수동 (핸드셋) 정렬 - 갑판 가장자리 선 정렬 (Deck-edge Cable Alignment)은 DCS에서 구현되지 않았다. TID는 GND ALIGN 절차 수행할 때와 똑같은 정보를 보여준다.
정밀 정렬이 완료될지라도 항공모함 위에서 잘못된 기수 방위 (heading)가 읽힐 수도 있음에 주의해야 한다. 기수 방위는 항공모함 자신의 자기장과 유도 자기장 (Induce Magnetic Field) 때문에 항공모함에서 주기된 위치와 항공모함의 진행 방향에 따라서 20도 혹은 30도를 벗어날 수 있다. 승무원이 항공모함의 BRC (Base Recovery Coarse)를 아는 것이 중요하다. 항공모함의 자기 변곡 (Magnetic Distortion)으로 야기되는 자기 변화 (Magnetic Variation)는 이륙 후 얼마 안 되어서 없어질 것이다. 이 자기 변곡 (Magnetic Distortion)은 정렬 품질에 영향을 주지 않는다.
항공모함 데이터 링크 정렬
주요 항공 모함 정렬 모드는 RF 데이터 링크 정렬 (CAINS)이다. 이 모드는 함선의 INS (SINS)를 사용하여 IMU를 정렬한다. 관성은 함선의 경도, 위도, 북쪽과 동쪽 속도뿐만 아니라 Roll, Pitch, 기수 방위도 입력하며, 진행 방향 속도 (Heading Rate)는 RF 데이터 링크를 통해 WCS 컴퓨터에 전송된다.
이 자료는 함선의 데이터 링크 장비로 전송된다. CVA 정렬 방법에 의해서 INS를 정렬하기 위해 다음 단계를 따른다.
1. 데이터 링크 체계에 전원을 켠다.
2. WCS 전원을 STBY로 켠다.
3. DATA LINK 제어반의 D/L 모드를 CAINS/WAYPT로 설정한다.
4. NAV MODE 스위치를 CVA ALIGN로 선택한다.
수신된 자료는 항공기의 데이터 링크 장비로 처리되고, WCS 컴퓨터에 보내진다. WCS 컴퓨터는 함선의 INS 자료와 IMU 자료를 비교하고 IMU 정밀 정렬을 위해 CSDC로 정정 신호를 보낸다.
쪽지
● 만약 CVA 혹은 CAT ALIGN이 OBC BIT 선택하는 것보다 먼저 선택된다면, 데이터 링크 OBC 작동 시험은 억제된다. (아직 구현되어 있지 않음.)
● 정밀 정렬 완료 표지는 정밀 정렬의 완료와 정렬 자료가 SINS 혹은 Handset인지를 나타낸다. 좋은 SINS 자료는 filter cycle 중에는 수신되지 않고, 정밀 정렬 완료 표지는 거의 0.75 인치 왼쪽으로 건너뛴다. 이 건너뜀은 SINS 자료가 간헐적이고, Handset 정렬 자료가 필요함을 나타낸다.
CVA ALIGN은 GND ALIGN과 매우 비슷하고, 거친 혹은 정밀 정렬 단계 동안에 유발되었는지에 따라서 GND ALIGN 동안에 똑같은 방식으로 정렬이 일시 중단, 정지 및 재초기화된다.
쪽지
SINS 데이터 링크를 장내 주행 (taxi)하는 동안 잃어버리게 된다면, 반짝이는 HS가 TID에 나타날 것이다. 이는 데이터 링크가 다시 획득되었을 때 사라질 것이다. 하지만, 정렬 시기 필요 때문에 데이터 링크가 다시 획득된 후 8초까지 반짝이는 게 남아있을 수도 있다. HS 반짝임이 주차 브레이크를 재설정한 후 8초 동안 멈추지 않는다면, SINS 자료가 손실되지만 항공모함의 속도와 진짜 진행 방위 (True Heading)를 자신의 항공기 파일에 넣고, Handset 모드에서 정렬을 완료하는 것으로 정렬이 계속된다. 이 시기에 데이터 링크가 다시 획득된다면, TID에서 HS가 사라질 것이고 일반 데이터 링크 CVA 정렬이 계속될 것이다.
정렬을 완료하기 위해서는 NAV MODE 스위치를 INS로 설정한다. 성공적으로 정렬된 INS는 TID에서 STBY와 READY 등화가 꺼지고, 상태 판독값에서 IN 두문자어가 사라지는 것으로 알 수 있다.
쪽지
● 함선이 선회 중에는 정밀 정렬이 완료되었을지라도 INS로 바꾸지 않는다. 이는 정렬 품질을 상당히 떨어뜨릴 것이다. 만약 함선의 선회가 완료될 때까지 기다린다면, 정렬 품질은 영향을 받지 않을 것이다. Handset 정렬은 영향을 받지 않는다.
● CVA 정렬 중에 CAINS/WAYPT-TAC 스위치가 출력 과도 변동 (Power Transient)로 풀려버리거나 데이터 링크 신호를 잃어버린다면, INS는 Handset 정렬 (HS)로 돌아갈 것이다.
항공모함 전선 정렬
Deck-edge Cable Alignment 갑판 가장자리 전선 정렬 (SINS)은 RF 데이터 링크 정렬의 대안이다. 입력들은 보안 전선을 통해 갑판 가장자리 배전함에서 데이터 링크로 전송된다. RF 데이터 링크를 전선 입력으로 전환하는 것은 전선이 연결되었을 때 자동으로 완료된다. 전선을 통해 SINS로 CVA 정렬을 시작하기 위해서는 RF 데이터 링크 정렬과 똑같은 단계를 이용한다. 전선과 RF 데이터 링크 정렬은 사실상 똑같기 때문에, DCS에서는 구현되어 있지 않다.
쪽지
SINS-전선은 현재 DCS에서 구현되어 있지 않다.
핸드셋 정렬
HS 정렬 모드는 항공모함 정렬을 위한 수동 정렬 선택으로, RF 데이터 링크 혹은 전선의 SINS 자료를 사용할 수 없거나 부정확하거나 방해받을 경우에 (DDI에서 TILT 등화로 그리고/혹은 정밀 정렬 완료 표지가 약 0.75 인치 왼쪽으로 도약하는 것으로 나타난다.) 사용할 수 있다. HS는 또한 GND ALIGN 모드와 비슷하지만, 함선의 움직임 때문에 RIO는 더 많은 자료를 입력해야 하고 컴퓨터는 수행하는 데에 더 오랜 시간이 걸린다.
만약 NAV MODE 스위치로 CVA ALIGN를 선택하고 이용할 수 있는 SINS 자료가 없다면, 반짝이는 HS 두문자어가 TID에 나타날 것이다. TID에서 HS는 정렬이 시작되기 전과 RIO가 Handset 정렬과 함께 체계 정렬을 선택할 때마다 깜빡인다. 그는 반드시 아래에 함선의 자료와 일치하는 값을 넣어야 한다.
1. 속도.
2. 함선의 진짜 진행 방향.
3. 위도.
4. 경도.
5. 보정된 기압 고도.
거친 정렬 중에 데이터 링크를 잃어버린다면 (RF 혹은 전선) 혹은 저장된 기수 방향 정렬의 어떤 부분 도중에서라도 끊어진다면, 정렬은 재시작될 것이고, HS 두문자어가 반짝일 것이다. 그 후 위에서 설명한 대로 정렬은 Handset 모드로 계속될 수 있다.
저장된 기수 방향 정렬의 정밀 정렬 단계 도중에 재시작하게 된다면, CSDC 정렬 절차는 우선 AWG-9 OFF를 6초 동안 끄는 것으로 반드시 초기화 되어야 한다.
보통의 정밀 정렬 단계 도중에 데이터 링크가 끊어진다면, HS는 자동으로 들어갈 것이지만, 두문자어가 반짝이지 않을 것이며 정렬은 계속될 것이다. 데이터 링크가 다시 연결된다면, HS 두문자어는 사라질 것이고, RF 혹은 전선 데이터 링크를 통한 일반 CVA 정렬이 계속될 것이다. 데이터 링크가 다시 연결될 때, 두문자어는 8초까지 남아있을 수 있다.
쪽지
HS가 반짝이지 않는다면, 유효한 SINS 자료가 이미 입력된 것이다. 반짝인다면, SINS 자료는 수동으로 입력되어야 한다.
CAP NAV DATA 행렬에서 OWN AC를 사용하고, LAT와 LONG 접두는 단추를 누른다. 함선의 진방위와 속도를 넣기 위해서 현재 항공기 HDG와 SPD 단추를 사용한다. 한 번 이 자료들이 입력된다면 HS는 반짝임을 멈출 것이고, 정렬은 일반적인 GND ALIGN처럼 수행될 것이다. 하지만 시간이 3배까지 걸릴 수 있다.
쪽지
항공모함은 정렬하는 동안 성공적으로 이 방법을 위해서 변함없는 속도와 진방위를 유지해야한다. Handset 정렬 품질은 항상 일반적인 CVA ALIGN 정밀 정렬 품질보다 뒤떨어질 거라는 것을 기억해야 한다.
재설정
정밀 정렬 단계에서 정렬을 재설정하기 위해서는, 관측 가능한 두문자어 (O) 혹은 정지된 정렬을 확인한 경우 RIO는 다음과 같은 방법 중 하나를 사용할 수 있다.
1. NAV MODE 스위치와 WCS 스위치를 OFF로 설정한다. TID 화면이 꺼지도록 한다. 일반적인 시작 순서로 진행한다.
2. NAV MODE 스위치를 OFF로 설정한다. NAV MODE 스위치를 원하는 정렬 모드로 설정한다.
3. NAV MODE 스위치를 INS로 설정한다. INS에서 체계를 확인한다. (TID에 IN 두문자어). NAV MODE 스위치를 OFF로 그리고 원하는 정렬 모드로 되돌리는 과정을 순환한다.
재설정 중일 때 위와 같은 절차들을 따르는 것을 실패하면, 정밀 정렬의 정렬 품질이 심각하게 낮아지는 결과를 초래할 것이다. 거친 정렬 중에 프로그램을 재설정하기 위해서는, RIO는 GND ALIGN을 선택하지 말아야하고, LAT와 LONG를 다시 기입하고 GND ALIGN을 다시 선택해야 한다.
저장된 기수 방향 정렬
빠른 반응 응답을 할 수 있는 INS의 특징은 저장된 기수 진행 방향 정렬이다. 항공기는 주차를 시켜야하고, 경계 위치 (DCS에서는 바퀴 고임목Wheel Chocks)에 묶어둬야 이 절차를 성공적으로 수행할 수 있다. 추가로 항공기가 전원이 꺼지기 전에 (그리고 다시 공급되기 전에) 항공기 기수 방향은 기준 정렬과 함께 저장되어야 한다.
항공기의 전원이 다시 공급될 때, 체계는 저장된 기수 방향으로 INS를 정렬하기까지 2분이 걸리지 않는다. 반면에 전체, 정밀 지상 혹은 항공모함 정렬과 거의 동일한 정확성을 제공한다. 정렬이 선택되고, 기준 정렬이 이용가능할 때, 자동 저장된 기수 방향을 뜻하는 ASH 약어가 TID에 표시될 것이고, CAP에 STORED HDG ALIGN이 빛날 것이다. ASH 약어는 RIO에게 저장된 기수 방향 자동으로 입력되었음을 알린다.
RIO에게서 더 이상의 행동은 필요로하지 않는다. ASH 정렬은 계속될 것이고, ASH는 TID에서 경보로써 남아있을 것이다. CAP에서 STORED HDG ALIGN을 한 번 누르는 것은 ASH 정렬을 종료할 것이고 일반적인 정렬을 시작할 것이다. ASH 약어는 사라질 것이다. STORED HDG ALIGN을 두 번 누르면 저장된 기수 방향 정렬을 재설정할 것이지만, ASH는 TID에 더 이상 표시되지 않을 것이다.
쪽지
STBY/READY 등화는 동시에 빛나게 관찰되어야만 한다. 만약 42초에서 45초 후에도 동시에 빛나지 않는다면, 정렬을 재설정하는데 결함이 초래되고, 잘못된 정렬이 될 수 있다. RIO는 반드시 NAV MODE 스위치를 OFF로 1초 동안 전환해야 하고, 그 다음 일반적인 지상 혹은 항공 모함 정렬 절차를 따라서 정렬을 다시 시작해야한다.
기준 정렬은 내부 혹은 외부 전원 중 하나로 수행될 수 있다. 기준 정렬을 하기 위해서는, CAP를 통해 위도와 경도를 현재 항공기 정보 안에 입력한다. 이는 GND ALIGN을 선택하기 전에 본거지 입력으로부터 현재 항공기 정보로 자동 송신을 통해 달성될 수 있다. 혹은 GND ALIGN이 선택한 후에 현재 항공기 정보 안에 기입하여 달성될 수 있다.
항공기의 위도와 경도는 다음과 같은 단계를 통해서 본거지로 입력될 수 있고, 현재 항공기 정보에 송신받을 수 있다.
1. NAV MODE 스위치를 GND ALIGN으로 설정한다.
2. CAP 범주를 TAC DATA로 선택한다.
3. HOME BASE를 누르고 CAP 자료 기입 단추로 항공기 경도와 위도를 기입한다.
항공기 위도와 경도는 다음과 같은 단계를 따라 직접 기입될 수도 있다.
1. NAV MODE 스위치를 OFF 혹은 GND ALIGN으로 설정한다.
2. CAP 범주를 NAV로 선택한다.
OWN A/C를 누르고, CAP 자료 기입 단추로 항공기 경도와 위도를 기입한다.
쪽지
OWN A/C를 눌러서 소유한 항공기를 건다.(hook) 만약 NAV MODE 스위치를 OFF로 설정한 상태에서 경도와 위도를 입력하면, NAV MODE 스위치를 OFF에서 GND ALIGN으로 다시 설정할 때 현재 항공기를 걸어(hook)야 한다. 걸려진 무엇이든 (OWN AC 혹은 HB) NAV MODE를 OFF에서 GND ALIGN으로 설정할 때 입력된 자료를 제공하게 됨을 알아야 한다.
기준 정렬 (Reference Alignment)를 위해서, 정렬은 정밀 정렬 완료에 도달해야 한다. CVA ALIGN과 GND ALIGN 모두 기준 정렬을 설정하기 위해 사용할 수 있다. 기준 정렬은 마름모에 점이 나타날 때 완료된다.
기준 정렬을 설정하기 위해서는 다음 단계를 따른다.
1. WCS 스위치 - STBY.
2. NAV MODE - CVA 혹은 GND.
3. DATA LINK - ON (CV 운용 한정).
4. D/L MODE - CAINS/WAYPT (CV 운용 한정.)
5. 기준 정렬은 계속해서 정밀 정렬 완료까지 진행한다.
기준 정렬을 저장하기 위해서는
6. NAV MODE 스위치를 INS로.
7. WCS - OFF / NAV MODE - OFF.
쪽지
불안정한 현재의 혹은 임시의 동력 손실은 CAINS가 선택 취소 되게 할 수 있고, HS 약자를 깜빡이는 것으로 표시될 것이다. 정밀 정렬이 완료될지라도 기준 정렬은 Handset 정렬을 통해서 수행될 수 없다. 성공적인 기준 정렬을 위해서 항공기는 움직이지 말아야 하고, 기준 기수 방향 (reference heading)이 저장된 후에는 주차 브레이크가 순환하면 안 된다. 유효한 기준 정렬을 위해서, NAV MODE를 INS로 전환하는 것은 필요하지 않고, 대신 CVA 혹은 GND ALIGN 에서 OFF로 직접 전환되는 것은 가능하다.
사출 장치 정렬
CAT ALIGN 모드는 사출 장치 위에 위치하고, 주차 브레이크가 푸려있을 때 정렬 유예를 막기 위해 사용된다. 사출 장치 정렬 모드의 목적은 가능한 한 일반적인 CVA ALIGN을 제공하는 것이다. CAT ALIGN이 선택될 때, 함선의 커다란 roll, pitch, 속도와 기수 방향 변화로 프로그램이 자동으로 INS로 전환될 수 있다.