
Heatblur DCS F-14 Tomcat — Heatblur F-14 Tomcat 1.0 documentation
© Copyright 2019, Heatblur Simulations
www.heatblur.se
DCS World, F-14 톰캣 Heatblur Manual 히트블러 메뉴얼
3-25 일반 설계와 체계의 개요
항법 ⑩
목차
● General Design and Systems Overview
○ Navigation
■ Navigation System Integration
● 일반 설계와 체계의 개요
○ 항법
■ 항법 체계 통합
항법 모드
F-14에는 세 가지의 항법 모드가 존재한다. 첫 번째 항법 모드는 관성이고 IMU (그리고 PSU)와 CSDC 사용하는 INS로 달성된다. INS는 승무원에게 현재 항공기 위치, 속도, 고도, 그리고 기수 방위각 정보를 제공한다.
두 번째 모드는 관성 측정 장비/기단(airmass) (IMU/AM) 모드이다. 이것은 예비의 항법 모드로 제공되고, 이 모드에 들어가는 것은 INS 기반 (INS Platform) 기수 방향 정렬을 영구적으로 저하시킨다.
세 번째 모드는 AHRS/기단 (AHRS/AM) 모드이다. 이는 AHRS 고도와 기수 방향 정보를, IMU를 대신하여 활용한다. 또한 INS와 IMU/AM 모드가 고장났을 경우 추가적인 예비 모드로 제공된다.
관성 항법 모드
INS 모드는 정렬 다음에 들어가야만 한다. READY 등화는 GND와 CVA 정렬 위치에서 빛이 나고, CAT 정렬 후에도 계속 켜져있어서 정렬의 완료를 나타낸다. INS 모드를 선택했다면, STBY와 READY 등화가 둘 모두 꺼질 것이다. 하지만 INS 모드를 ^ 표시가 ◇로 변하기 전에 선택했다면, STBY와 READY 등화가 빛날 것이고 체계는 IMU/AM 예비 모드로 되돌아갈 것이다.
INS 모드에서, IMU와 CSDC는 다음 값들을 제공한다.
1. 항공기 위도와 경도.
2. 항공기 기수 자방위 혹은 진방위 (선택된 CAP 접두사 단추를 따른다.)
3. 체계 고도 System Altitude (기압 감쇠 관성 고도)
4. 플랫폼 방랑 각도 (Platform Wander Angle)
5. 속도 부품 (x, y, z)
6. 수직 가속도
항공기 기수 자방위는 AHRS에서 얻는다. AHRS가 고장날 경우, 기수 자방위는 진방위에서 MAG VAR을 빼는 것으로 얻는다. TID에서 이용할 수 있는 판독값은 위도, 경도, 지상 속도, 지상 추적, 실제 대기 속도 (TAS), 바람 (속도와 방향), MAG VAR, 고도, 그리고 항공기 진방위 혹은 기수 자방위를 표시할 수 있다.
WCS 컴퓨터는 조향을 위해 진북 좌표로 계산하고, AHRS에서 입력되는 기수 자방위로 값을 최신화한다. 바람은 관성 속도와 기단 속도 (Air mass Velocities) 사이의 차이로 계산한다. WCS와 CSDC도 비행 승무원 화면을 위해서 필요한 조향과 기능의 단서(cueing functions)를 제공한다. 정보는 비행 승무원이 선택하는 항법과 조향 모드에 따라서 TID, HSD, 다중 화면 지시계, HUD, 그리고 VDI에 표시될 수 있다.
이용 가능한 목적지 혹은 항법 지점은 중간 경로 (Waypoint) 1, 2, 혹은 3, 고정점 (Fixed Point), 본거지 (Home Base), Surface Target (지상 표적), 그리고 시작점 (Initial Point)이고 TID의 DEST 스위치로 지정될 것이다.
추가로, 항법점 (Navigational Points) (위도와 경도)는 RIO가 CAP를 사용하여 혹은 전선(cable)이나 RF link 중 하나를 이용하는 데이터 링크 문자 (갑판 위에 있을 때)로도 입력될 것이다.
설정할 경로 (선택한 항법점으로 향하는 기수 방향), 거리, 방위각, 그리고 지점까지의 시간은 대권을(The great Circle) 기반으로 한다. 지점까지의 시간은 항공기가 선택한 지점으로 대권 방향을 따라 현재 지상 속도로 비행하는 것을 가정한다.
쪽지
INS 결함일 경우, RIO는 계산된 MAG VAR과 WIND 자료를 확인해야 하고, 필요에 따라 수동 입력을 통해서 최신화해야 한다.
IMU/AM 항법 모드
CSDC의 항법 컴퓨터 부분이 결함 혹은 IMU에서 어떠한 결함이 발견된다면, IMU/AM 모드에 자동으로 들어간다. 결함은 STBY와 READY 등화 빛나는 것, 그리고 RIO 주의/경고반에서 NAV COMP 등화가 빛나는 것으로 알 수 있다.
IMU/AM로 전환은 TID와 HSD의 IN 두문자어가 IM으로 바뀌는 것으로 알 수 있다. RIO는 STBY와 READY 등화를 끄기 위해서 NAV MODE 스위치를 IMU/AM을 선택해야 한다. IMU/AM 모드는 NAV MODE 스위치로 IMU/AM을 선택하는 것으로 수동으로 들어갈 수 있다.
만약 스위치가 IMU/AM 모드를 선택하기 전에 꺼진다면, 컴퓨터는 IMU/AM 모드로 약 3분에서 5분 동안 들어갈 수 없다. 이것은 꺼진 후에 IMU가 수평이 되도록 하기에 필요하다. 이 3~5분 동안, 항공기는 지상에서 움직이지 않거나 가속되지 않는 수평 비행을 유지해야 한다. IMU가 수평이 될 때까지, 컴퓨터는 AHRS/AM 모드를 사용할 것이다. IMU가 수평이라면 (즉, 거친 정렬을 지나서 정렬이 완료됨.), IMU/AM으로의 진입이 선택 즉시 이루어질 것이다.
쪽지
거친 정렬을 이후 정렬에 NAV COMP 결함이 없고 RIO가 IMU/AM으로 전환한다면, READY 등화가 반짝일 것이다. 이는 스위치가 INS로 5초 안에 되돌아가지 않는다면 새로운 정렬 완료 없이는 INS 모드로 다시 들어갈 수 없다는 것을 나타낸다.
WCS 컴퓨터는 IMU로부터의 기수 방위각과 CADC에서의 실제 대기 속도를 사용하여 IMU/AM 모드에서 추측 항법 항해를 수행한다. 예비 모드에서는 INS 모드와 동일한 일반적인 항법 기능을 수행한다. 사용 가능한 속도와 기수 방위각 정보의 부족 때문에 컴퓨터 출력의 정확도가 떨어진다.
바람은 INS 모드에서 마지막으로 계산된 바람을 사용하거나 바람 자료를 CAP를 통해서 수동으로 입력하는 것으로 적용할 수 있다. IMU 기수 방위각은 동일하게 마지막으로 계산된 INS 기수 방위각 혹은 CAP를 통해 수동으로 입력한 진방위각을 참고한다.
쪽지
IMU/AM 모드에 들어간 후, 바람과 MAG VAR 값을 확인한다. MV(MAG VAR)에 오류가 있다면, 현재 항공기의 진방위를 입력한다. 바람에 오류가 있다면 최신화한다.
IMU 재설정 절차
1. NAV MODE 스위치 - OFF, 몇 초 동안.
2. NAV MODE 스위치 - IMU.
3. 5분 동안 직선으로 수평 비행 한다.
4. IM 두문자어를 확인한다.
AHRS/기단 모드
AHRS/AM 모드는 항법을 위한 예비 모드이다. 마지막 항법 컴퓨터 값이나 RIO가 수동으로 입력한 자료로 알게 된 항공기 위치를 사용한다. 그 다음 항공기의 현재 위치를 추론한다. AHRS/AM 모드는 IMU 결함일 경우이거나 NAV MODE 스위치를 AHRS/AM으로 전환하는 것으로 자동 선택된다. IMU 결함은 STBY와 READY 상태등 그리고 IMU 주의등이 빛나는 것으로 표시된다. 추가로, TID에서 자세 상태 정보가 AH로 바뀐다.
경고: 항법 모드는 IMU 결함 시에도, 항법 체계가 IMU 양자화 장치 (IMU Quantizer)의 결함과 NAV COMP 경고등이 켜진 IMU/AM모드에 있을 때 자동으로 AHRS/AM로 전환되지 않을 것이다. VDIG/TID/DDD가 실효성 없는 IMU 자세를 표시하기 때문에, NAV MODE 스위치를 AHRS/AM로 이동시켜야 한다.
쪽지
IMU 결함일 때 항법 모드가 자동으로 AHRS로 전환되기는 하지만, STBY와 READY 등화는 RIO가 NAV MODE 스위치를 AHRS/AM로 선택할 때까지 켜진 채로 남을 것이다.
AHRS/AM은 NAV MODE 스위치에서 선택한다. AHRS는 IMU 기반을 대신해서 DR(Dead Reckon, 추측 항법) 항해를 위한 기수 방위각 정보를 제공하고 CSDC는 기압 고도, 고도 변화 속도 (Altitude Rate), 그리고 실제 대기 속도를 IMU/AM 모드일 때와 같이 제공한다. 바람 속도와 방향 그리고 자기 변위를 최신화하기 위해서는 CAP를 사용한다.
AHRS는 나침판 제어 장치반에서 세 개의 부가 모드 중 하나로 작동할 수 있따.
1. SLAVED - 자북 기준으로 하며 (유동 값), 방향 회전의(Directional Gyro)를 유동 값에 종속시킨다. 신뢰할 수 있는 기수 자방위 참고를 사용할 수 있는 장소에서 사용한다.
2. DG - 자유 방위 회전의 (Free Azimuth Gyro). 지구의 극성 작용 (Polar Operation) 때문에 이동을 보정하고, 자기장 참고를 신뢰할 수 없는 곳에서 사용한다.
3. COMP - 자북 기준 방향 (유동 값), 회전의 제동이 없다. HUD, VDI, HSD 그리고 다중 화면 지시계는 이 모드에서 자동으로 수동 자기 변위 (vM)을 사용한다.
RIO는 비교를 위해 INS 모드에서 AHRS/AM 모드로 혹은 IMU/AM 모드에서 AHRS/AM 모드로 전환할 수 있고, AHRS는 별도의 체계이므로 질적 저하가 없이 전환할 수 있다. 이것은 INS와 IMU/AM 모드로 완료될 수 없는데 IMU는 두 가지 경우에서 사용되기 때문에 이는 IMU 정렬에 영구적인 질적 저하를 초래할 수 있다. IMU 결함의 경우 WCS 컴퓨터가 AHRS로부터 기수 방위각을, CADC로부터 대기 속도를 수신하는 한 항법 체계는 자동으로 AHRS/AM 모드에서 운영된다. 이때 항법 및 자료 출력판은 INS 모드에 있게 된다.
쪽지
AHRS/AM 모드에서 이륙을 수행한다면, MAG VAR과 WIND은 적절한 항법 계싼을 위해 CAP를 통하여 수동으로 입력되어야만 한다.
기반이 정렬되고 AHRS/AM 예비 항법 모드가 선택될 때, STBY 등화는 꺼지지만 READY 등화는 켜진다. 이는 원한다면 관성 항법 모드 (Inertial Navigation Mode)를 선택할 수 있다는 것을 나타낸다. INS에서처럼 화면에 같은 기능과 출력으로 계산된다. 하지만 몇몇 계산에서 다른 입력들이 사용되기 때문에 질적으로 저하된 항법 수행이 예상된다.
조향
조향에는 두 가지 기본 유형이 있다. 항법과 공격이다. 공격 조향 모드는 무장 및 무장 운용 개요을 다룰 것이다.
항법 조향은 대권 항로(The great Circle course) 혹은 지구 표면의 고정점으로의 항정선(Rhumb line) 아니면 선택한 경로 혹은 진행 방향으로부터 편차 같은 것으로 계산된다. 일반적으로, 대권 계산은 장거리를 위해서 쓰이고 항정선은 짧은 거리 (대권 항로에 가까운 경우)을 위해 사용된다. 조향을 위한 지점은 RIO가 선택한 목적지 (세 개의 중간 경로, 고정점, 식별 지점, 지상 표적, 혹은 본거지), TACAN 기지, ADF 정보, ACLS 정보, 혹은 데이터 링크 중간 경로가 될 수 있다.
Flight Modes and Steering Submodes
비행 모드와 조향 부가 모드
조종사는 조종사 화면 제어반에서 다섯 개의 VDIG 화면 구성 방식 (HUD 모드) 중 하나를 선택할 수 있다. 이 다섯 가지 비행 모드는 다섯 개의 수직, 상호 배타적인 단추로 배열되어있다.
1. 이륙 (T.O.)
2. 순항 (CRUISE)
3. 공대공 (A/A)
4. 공대지 (A/G)
5. 착륙 (LDG)
쪽지
ACM 덮개를 여는 선택은 T.O.와 LDG 모드를 제외한 모든 모드를 무시한다.
VDIG 화면은 제외하고, 비행 모드 선택은 또한 AFCS, 무장, 그리고 WCS 논리를 제어한다. VDIG 구성 방식은 고도, 수직 속도 지시계 등과 같은 필수적인 자료뿐 아니라 조향 신호 (cue)도 제공한다.
각각의 비행 모드에서, 조종사는 다음의 다섯 가지 조향 명령 중 하나를 선택할 수 있따.
1. TACAN (TACAN)
2. 목적지 (DEST)
3. AWL/PCD
4. 진로 (Vector, VEC)
5. 수동 (MAN)
다섯 개의 선택은 PDCP 최하단을 따라 수평으로 배열되어있다. 이 조향 모드들은 조종사 HSD와 RIO 다중 화면 지시계에서 화면 구성 방식 (Display Format)을 결정한다. HSD와 다중 화면 지시계는 수평면으로 선택된 지점으로의 조향을 제시한다. HSD는 조종사가 HSD-MODE 스위치를 NAV로 둘 때 다섯 개의 부가 모드를 따른다.
RIO는 그의 다중 화면 지시계 제어반에서 모드 스위치를 NAV로 설정하여 똑같이 할 수 있다. 또한, LDG가 선택되었을 때 조종사는 표시를 위해 HUD와 VDI를 개별적이고 독립적으로 선택하기 위해 사용하는 PDCP의 스위치를 통해 ICLS 혹은 ACL 정보의 표현 여부 선택권을 가진다. [조종사는 PDCP 스위치로 ICLS와 ACL 정보 표현을 선택할 수 있다.] HUD와 D/L전형적인 선택은 HUD를 ICLS (SPN-41 / ARA-63)로, VDI는 D/L(데이터 링크)용으로 하는 것이다.
A/A (공대공)과 A/G (공대지) 모드는 무장 및 무장 운용 개요 (Weapon and Weapon Employment Overview)에서 더 자세히 설명한다.
쪽지
항법 제어 및 자료 표시판에서 STEERING 표시 원통은 조종사가 선택한 조향 부가 모드가 무엇인지 RIO에게 알려주기 위한 표시를 제공한다.
이륙 조향
이륙 조향 모드로 들어가기 위해서는, 화면 제어반에서 T.O. 단추를 누른다. VDIG는 HUD 왼쪽에 수직 속도 지시계 그리고 오른쪽에 고도 눈금을 보여줄 것이다. 조종사는 HUD와 VDI 상단에, 알려진 참고 (활주로 방위각 그리고 배 위에서는 커다란 자기 변곡 (Magnetic Distortion)이 있기 때문에 항공모함에서 가장 중요하게는 BRC.)와 반대되는 자기 방위각을 이륙 전에 확인해야 한다. 수직 속도 지시계는 이륙 후 상승을 확인하기 위해 쓰여야 한다.
이륙 후, 항법 체계는 기본적으로 조향을 위해 필요한 바람과 자기 편차를 계산한다. 예비 모드를 위해서 WCS는 마지막으로 계산되거나 RIO가 입력한 바람 속도, 방향, 그리고 자기 편차를 사용한다.
Take-Off-TACAN Steering
이륙 TACAN 조향
TACAN 조향 부가 모드는 이륙용이든 순항이든 착륙이든 조종사에게 TACAN 편차를 제공하는 것으로 동일하게 작동한다. 조종사는 HSD상에 CRS 제어 장치로 경로나 TACAN 반경(TACAN Radial)을 설정할 수 있다. TACAN 화면은 HUD, VDI, HSD, 그리고 다중 화면 지시계에서 이용할 수 있다. HSD와 CMD는 TACAN 거리와 선택한 TACAN 기지와의 상대 방위각을 표시한다.
부가 모드에 들어가기 위해서는, PDCP에 있는 TACAN 단추를 누른다. TACAN 경로의 선택 후, HUD와 VDI는 TACAN 편차 기호와 TO 및 FROM 기호를 표시한다. 이것은 TACAN 경로로 향하든 TACAN 기지로부터 멀어지든 표시한다. HSD와 다중 화면 지시계에서, TACAN 경로와 똑같은 방향을 가리키는 편차 막대(Deviation Bar)의 화살표는 기지로 향하는 경로를 나타낸다. 반대 방향을 가리키는 화살표는 기지로부터 멀어지는 경로를 표시한다. HUD에서 점선은 FROM을, 직선은 TO를 표시한다. VDI에서 검은색 막대는 FROM을, 밝은 막대는 TO를 표시한다.
HUD에서 편차 기호는 선택한 TACAN 반경(TACAN Radial)으로부터 6º 편차만큼 시야에서 3º (선형으로) 이동한다. 이러한 한계는 시야에서 벗어나거나 좌우측에서 눈금을 방해하는 것을 방지한다. VDI에서 편차 기호는 6º 편차만큼 이동하기 위해 1.5 인치로 조정된다.
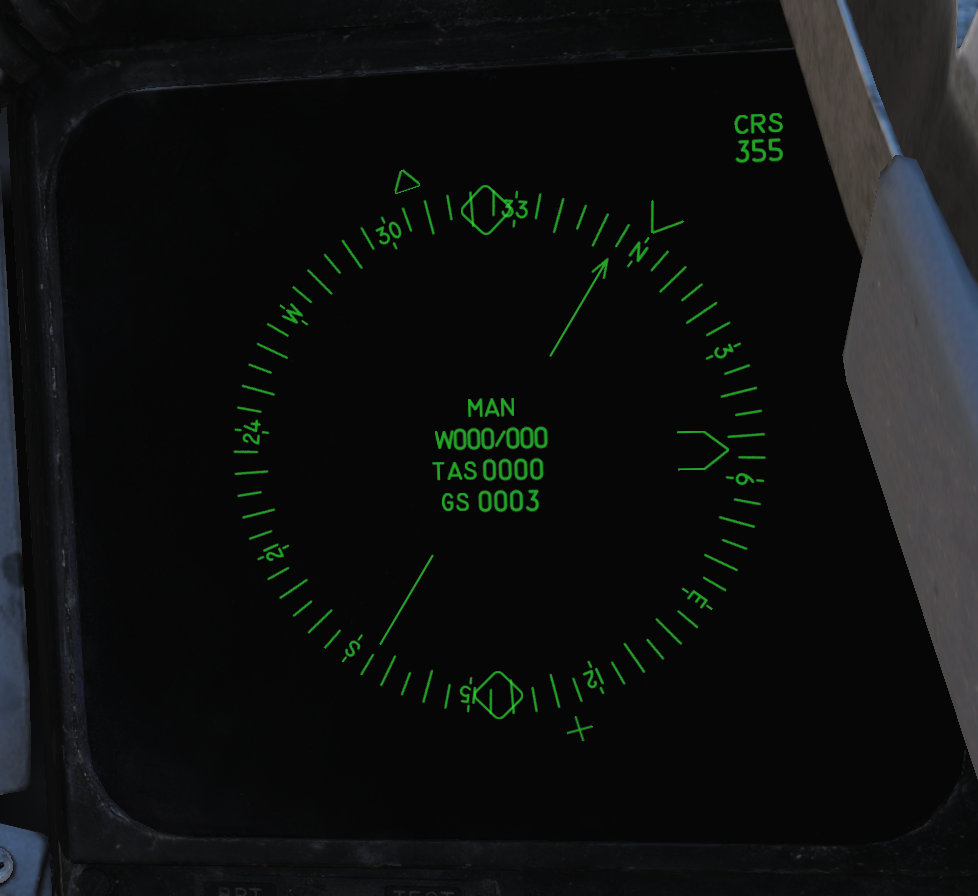
Takeoff Manual Steering
이륙 수동 조향
수동 조향 모드는 기본 이륙 모드와 비슷하다. 이 모드는 MAN 단추를 누르고 HSD의 CRS 제어 장치로 원하는 경로를 선택하여 들어갈 수 있따. 그 다음, 항법 체계는 VDI에서 자기 편차 눈금 아래에 작은 마름모로 명령된 기수 방향을 표시할 것이다.
순항 조향
순항 비행 모드에 들어가기 위해서는 PDCP에서 CRUISE 단추를 누른다. 순항 운용 중에 이용할 수 있는 네 가지 부가 모드가 있다. TACAN, 목적지, 수동과 진로(Vector)이다. 화면 제어반에서 AWL/PCD 조향 단추를 누르는 것은 물리적으로 가능하지만, 순항 모드에서는 기능이 없는 행동이다.
쪽지
CRUISE 중에는 AWL/PCD 부가 모드가 선택되어야 한다. 이는 다른 조향 신호의 화면을 억제할 것이다.
Cruise TACAN Steering
순항 TACAN 조향
이 부가 모드는 이륙 TACAN 조향과 같은 방법으로 작동하고, 동일한 판독값을 제공하며, 이륙 TACAN 조향에서 설명한 것처럼 비행 승무원에게 보여준다.
Cruise Destination Steering
순항 목적지 조향
순향 목적지 조향 모드에 들어가기 위해서는 PDCP에서 DEST 단추를 누른다. RIO가 항법 제어 장치 및 자료 읽기판에서 선택한 중간 지점을 VDI와 HSD에 명령된 진행 방향 기호로 표시하여 조향을 제공한다. RIO는 TID에서 지점을 갈고리질(Hooking)하고 새로운 자료를 삽입하는 것으로 목적지의 위도/경도를 바꿀 수 있다.
쪽지
● 방어 지점(Defended point)로 향하는 목적지 조향은 RIO가 TID DEST 스위치로 MAN을 선택할 때 제공된다. 이 선택은 TARPS에서는 이용할 수 없다.
● 목적지 조향 부가 모드, RIO가 선택한 목적지와 사용 중인 NAV MODE는 HSD의 중앙 하단에 번갈아가면서 표시될 것이다.


착륙 조향 모드
착륙 조향 모드에 들어가기 위해서는, PDCP에서 LDG 단추를 누른다. 보통 LDG 모드는 통제 지점(Marshal point)으로부터 언제든지 활성화된다. Go around, waveoff 혹은 bolter 의 경우 조종사는 이륙 조향 모드를 활성화하기 위해서 PDCP에서 T.O. 단추를 누른다.
착륙 모드 기호는 일반적으로 이륙 모드 기호와 동일하다. 예외는 HUD에 (E-Bracket, 속도 가감(Velocity Vector)이 아닌 표시된 항공기 날개를 기준으로 한다.) AOA 오차 기호 추가 그리고 속도 가감 기호 기호, VDI에 5º 상하 기울기(pitch) 증가의 추가이다.
쪽지
모든 착륙 부가 모드에서 D/L waveoff 문자 수신 시 VDIG 분리 기호 (Breakaway Symbol)이 표시될 수 있다.
착륙 중에는 세 개의 조향 부가 모드를 사용할 수 있다. TACAN, VEC, 그리고 AWL/PCD이다. LDG의 TACAN 이나 VEC 부가 모드에서, LDG의 경우 HUD 화면에 속도 가감 기호, 레이더 고도 기호 그리고 수직 속도 지시계 기호가 포함되어 있다는 것을 제외하면 HUD, VDI, HSD 화면들은 CRUISE에서의 동일한 부가 모드들과 비슷해 보인다.
AWL Steering
AWL 조향
만약 통제 지역 (Marshalling Area)에서 ARA-63에서 ICLS 정보를 이용할 수 있다면, 조종사는 AWL/PCD 부가 모드를 선택할 수 있다. 활공 경로(glideslope) 화면을 관찰하기 위해서는, 조종사 화면과 제어반에서 HUD와 VDI AWL을 ILS 위치로 두어야한다.
그 후 HUD와 VDIG는 수직 및 측면 정밀 경로 방향 기호 (Vertical and Lateral precision course vector symbols)를 제공하는데, 이것은 ICLS에 의해서 구동되는 십자선 표지를 형성한다. HUD에서 최대 크기(Full-scale)의 방향 굴절(Vector Deflection)은 2º로 제한된다. VDI에서 최대 크기의 방향 굴절은 1.5º이다. LDG의 AWL/PCD 부가 모드에서, 게다가 PDCP에서 NAV 모드로 HSD를 설정하면 TACAN 정보를 표시할 것이다.
획득 창(Acquisition Window)에서, 조종사는 ILS를 계속 표시하거나, SPN-42 데이터 링크에서 ACL 정보를 이용할 수 있다면 VDI 혹은 HUD 화면 혹은 둘 다를 위해서 AWL 스위치의 ACL을 선택할 수 있다. ACL 화면은 ICLS처럼 동일한 수직 및 측면 정밀 경로 방향 기호를 사용한다. 하지만 이것은 이제 SPN-42 데이터 링크로 조작된다. 착륙의 마지막 단계 동안 전형적인 화면 조합은 HUD에 ILS, VDI에 ACL이다. 유효한 ACL 자료를 이용할 수 있을 때, AFCS는 AFCS 제어반에 위치해있는 VEC/PCD, OFF, 그리고 ACL 스위치에서 ACL을 선택하는 것으로 활성화할 수도 있다.


