
BY CHUCK / 최신화: 2023년 8월 19일
한글 번역 목차
9장 - 레이더 & 센서
9-2. AWG-9 레이더
9.2.1. 레이더 인터페이스 & 조작
[261쪽]

AWG-9 레이더는 톰캣이 있던 시절 가장 혁명적인 과학 기술의 증진 그 자체였다. 대부분 단좌 전투기에서 레이더 화면이 작동하는 방식이 친숙하겠지만, 복좌기는 역할이 분리되어야 한다.
조종사는 주로 무장 발사, 항공기 비행, 육안으로 표적 찾기 및 RIO의 전방에서 정보들을 사용하는 책임이 있다. 조종사의 상황 인지 능력은 그가 직접 보고 있는 것에서 HSD의 TID 복사 모드가 말해줄 수 있는 것으로 확장된다. 조종사는 아주 제한된 방법으로, 특정 근거리 ACM (Air Combat Maneuver) 모드를 운용할 수 있으나 혼자서 레이더를 조작하는 것은 불가능하다.
이것이 RIO가 관여하는 이유이다. 그는 조종사를 위해서 레이더를 (탐적 방법, 절대 방위각/상하각, 모드, 기타 등등.) 제어하고, 표적을 락온하여 조종사가 교전할 수 있게 한다.


[262쪽]
레이더의 전원을 켜는 방법은?
주의: 아래 단계들은 일반적으로 지상에 있는 동안에 수행된다.
1. 전력을 사용할 수 있는지 확인한다. (지상 전원 혹은 엔진 발전기)
2. 엔진에 시동이 걸렸을 때와 엔진 Bleed Air를 사용할 수 있을 때 조종사와 소통한다. 왜? WCS는 ECS (Environment Control System, 환경 제어 시스템)로부터의 냉각 공기를 필요로 한다. 이는 결국 다음을 의미한다.
a) 두 개의 엔진이 모두 작동할 필요가 있다. (조종사가 시동을 걺.)
b) 조종사 조종석에서 AIR SOURCE 선택 장치를 BOTH ENG로 설정해야 한다.
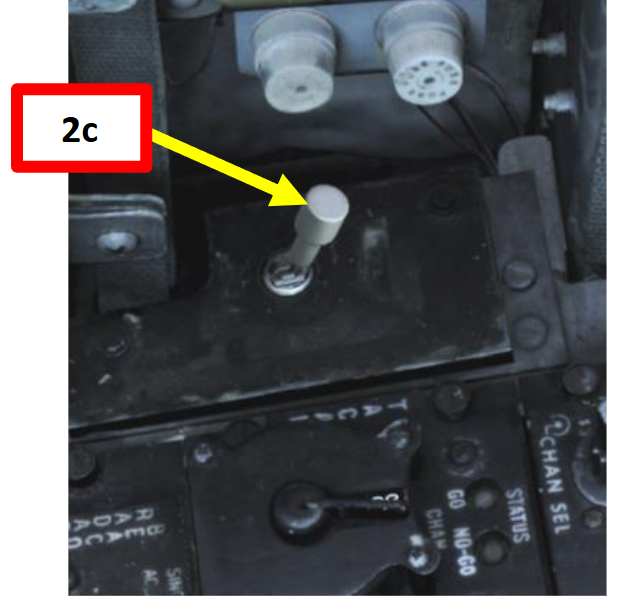
c) RIO의 조종석에서 LIQUID COOLING 스위치를 FWD (전방)로 설정해야 한다.
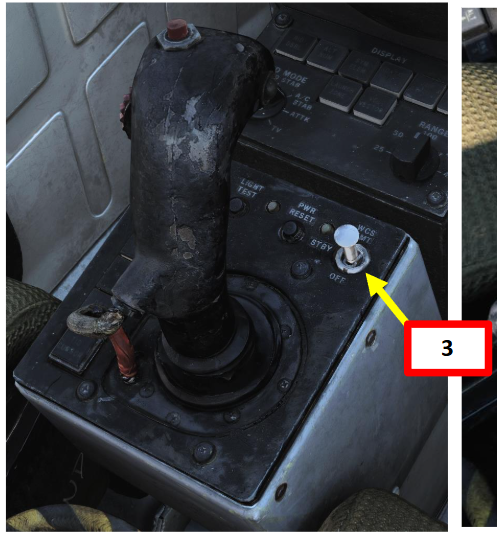
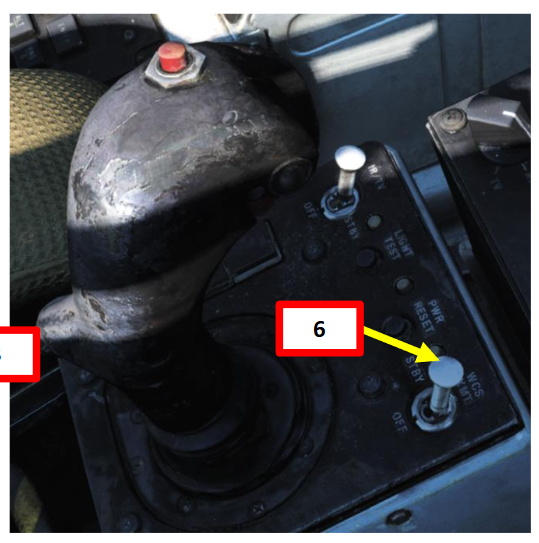
3. WCS (Weapon Control System) 스위치 - STBY
4. TID (Tactical Information Display)와 DDD (Detail Data Display)에 전원을 켜기 위해 약 40초간 기다린다.
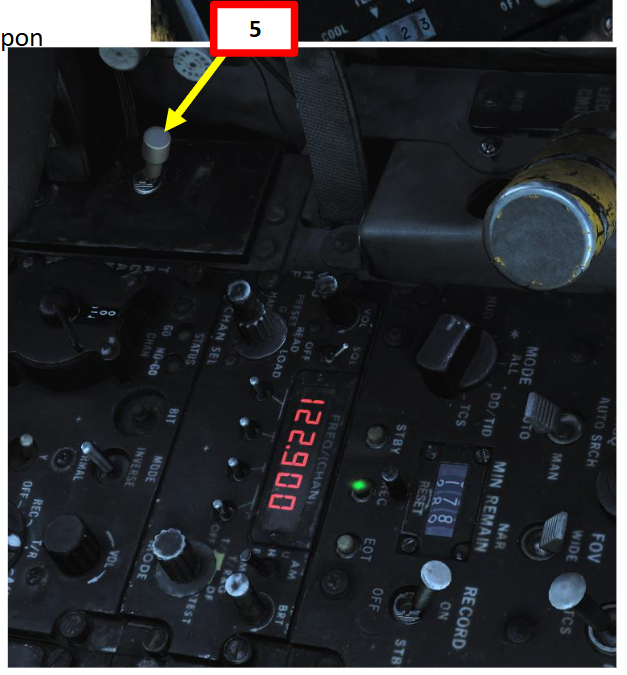
5. 액체 냉각(Liquid Cooling) 스위치 설정 - ON (전방). 이는 AWG-9 레이더 냉각 절차를 시작할 것이다.
6. 레이더가 작동하기까지 3분의 예열 시간을 가진 후, WCS (Weapon Control System) 스위치를 설정 ─ WCS XMT (송신)

[263쪽]
| 조종사 좌석 |
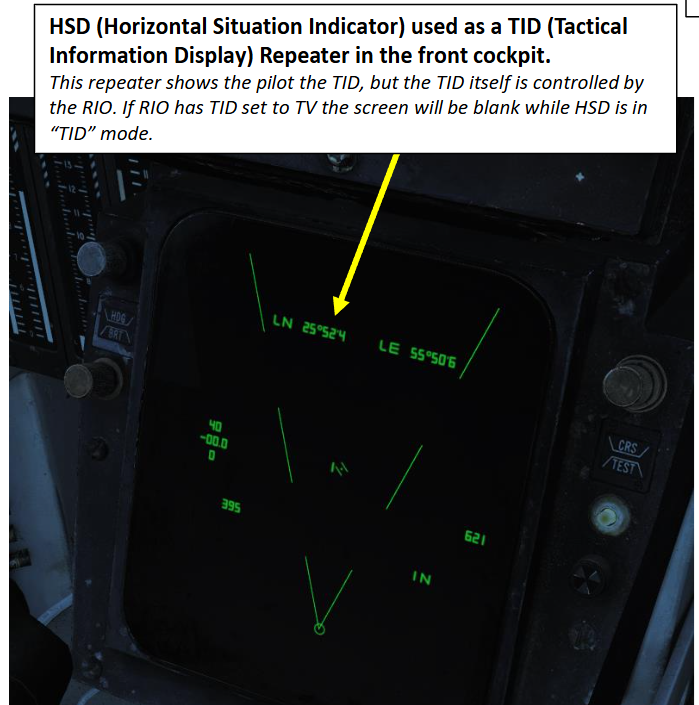
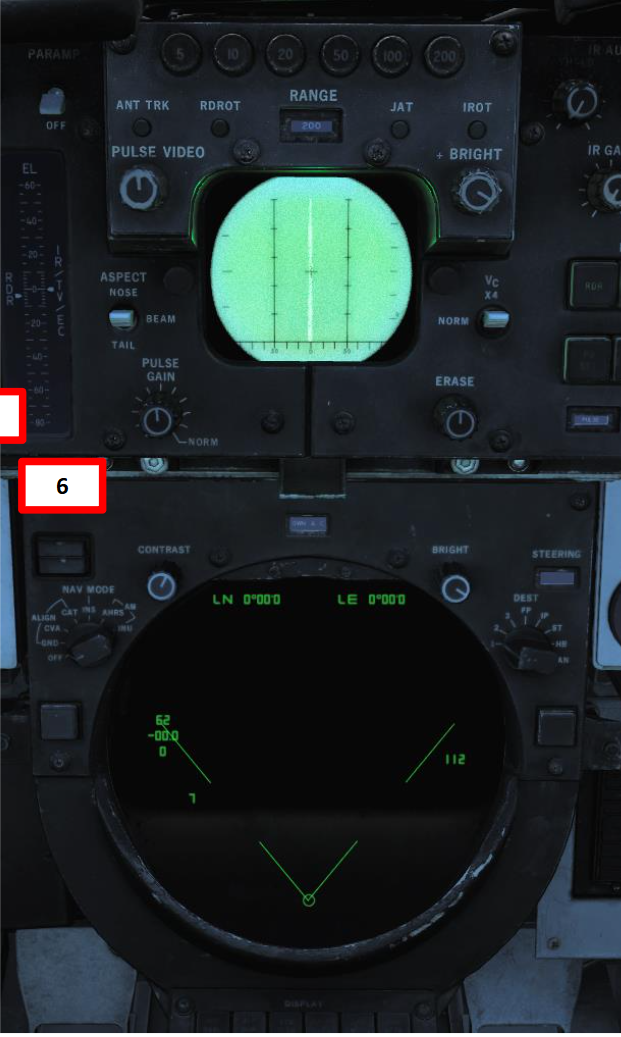
앞자리에서 TID (전술 정보 화면) 복사 화면으로 사용되는 HSD (수평 상황 표시계)
이 복사 화면은 TID를 조종사에게 보여주지만, TID 자체는 RIO가 제어한다. RIO가 TID를 TV로 설정하면 HSD가 "TID" 모드에 있는 동안 빈 화면이 된다.
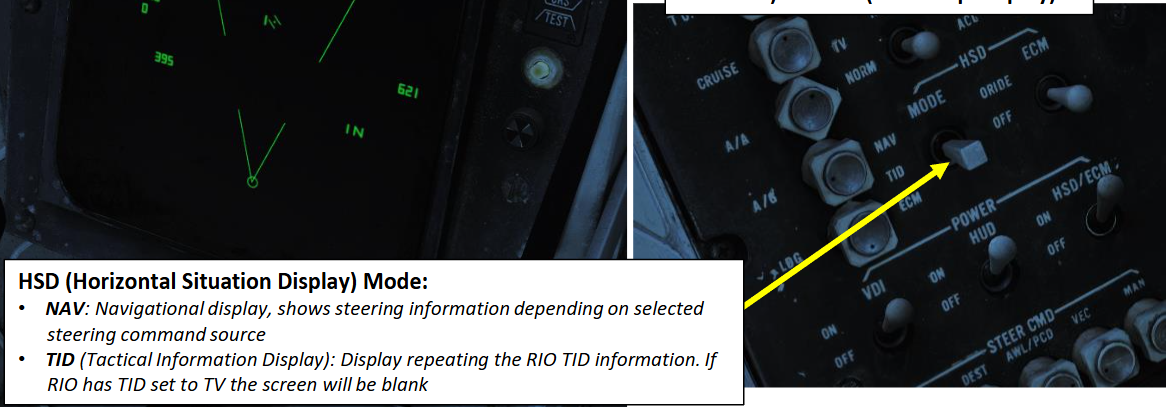
HSD (수평 상황 표시계) 모드:
● NAV: 항법 화면. 선택한 조향 명령 자료에 따른 조향 정보를 보여준다.
● TID (전술 정보 화면): RIO TID 정보를 그대로 복사하는 화면. RIO가 TID를 TV로 설정해두면 빈 화면이 된다.
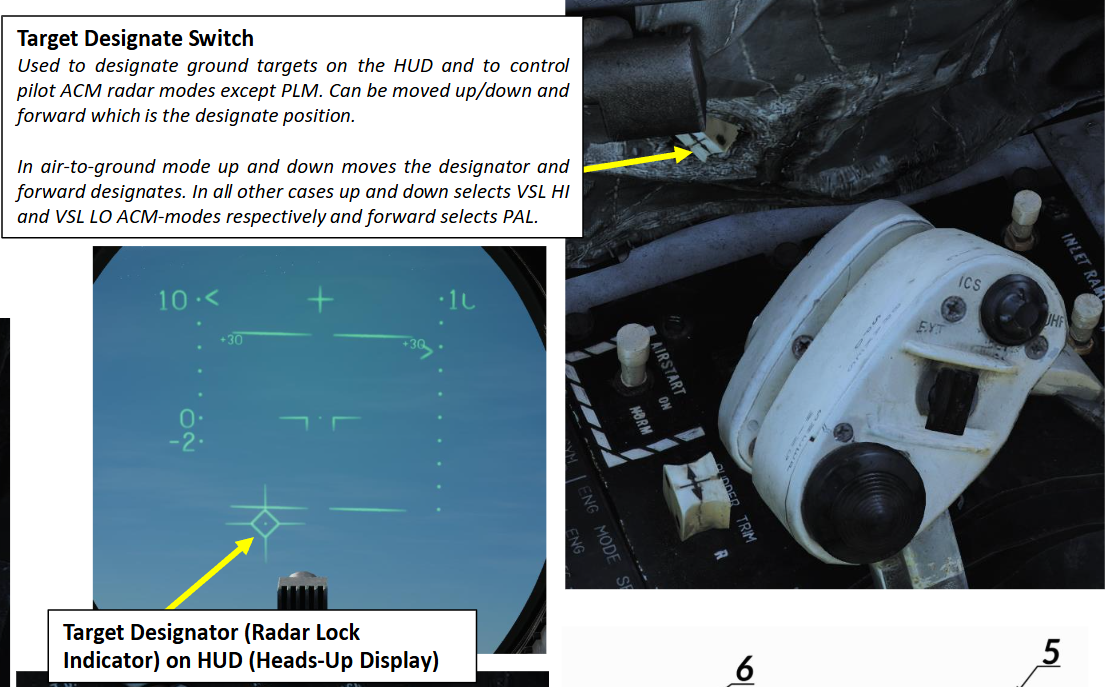
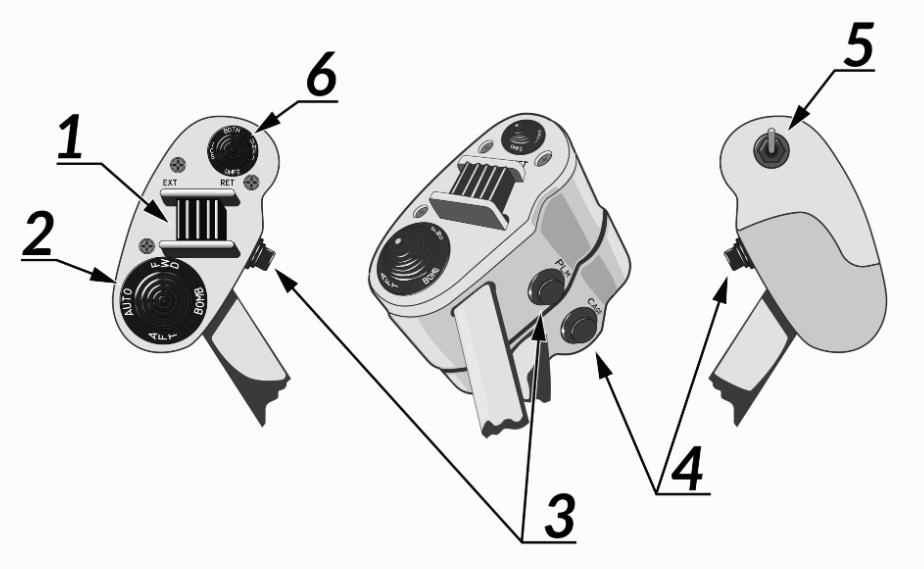
표적 지정 스위치
HUD에서 지상 표적을 지정하고, PLM을 제외한 조종사 ACM 레이더 모드를 제어하기 위해 사용한다. 위/아래 그리고 전방으로 움직일 수 있다.
공대지 모드에서 위아래는 표적 지시기를 움직이고, 전방은 표적을 지정한다. 다른 경우에는 위아래는 VSL HI 및 VSL LO ACM 모드를 각각 선택하고, 전방은 PAL을 선택한다.
HUD에서의 표적 지시기 (레이더 락 표시)
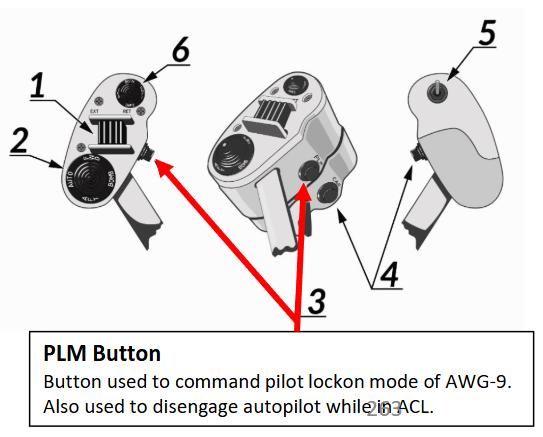
PLM 단추
AWG-9의 조종사 락온 모드를 명령하기 위해 사용한다. 또한 ACL 중에 자동 비행을 비활성화하기 위해서도 사용된다.
[264쪽]
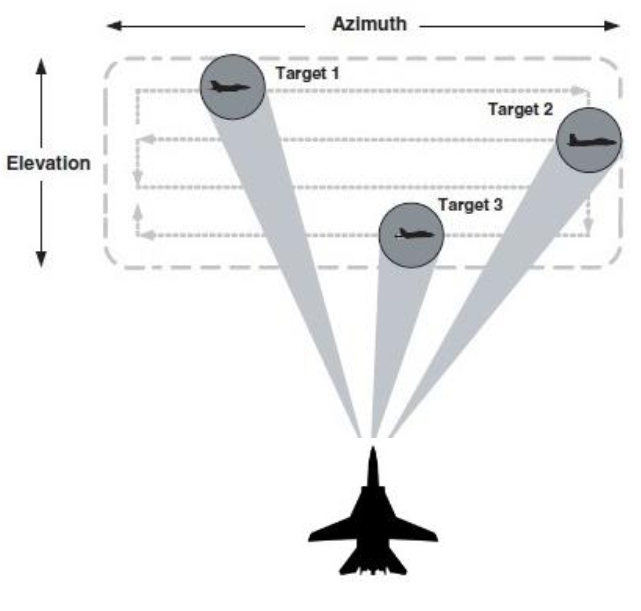
F-14의 레이더는 130도의 수평 호와 가변 수직 호로 200 해리의 탐지 거리를 갖고 있다. 레이더 탐색 패턴 (1, 2, 4 혹은 8개의 Bar)를 조절하여 더 좁거나
더 넓은 탐색 영역을 가질 수 있다.

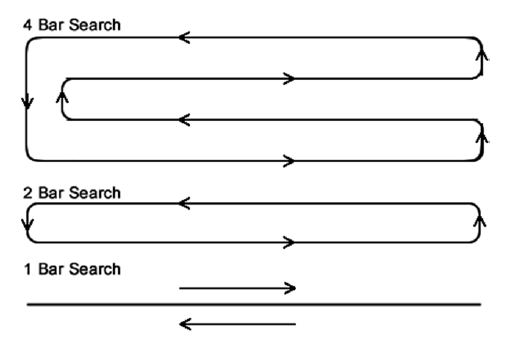


Bar 탐색 패턴과 안테나 상하각을 이용하여 상하각이 변할 수 있다. (탐지 거리: 200 nm)
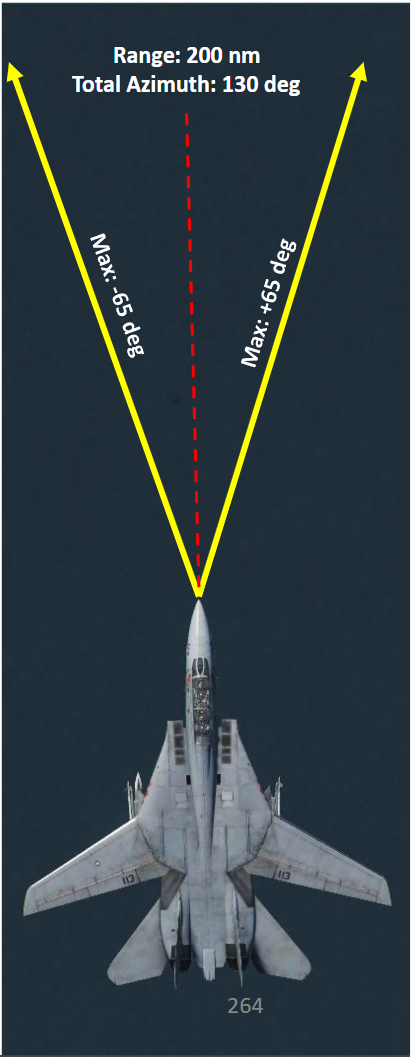
탐지 거리: 200 nm
총 절대 방위각: 130도
수평각 ±65도
[265쪽]
| RIO 좌석 |
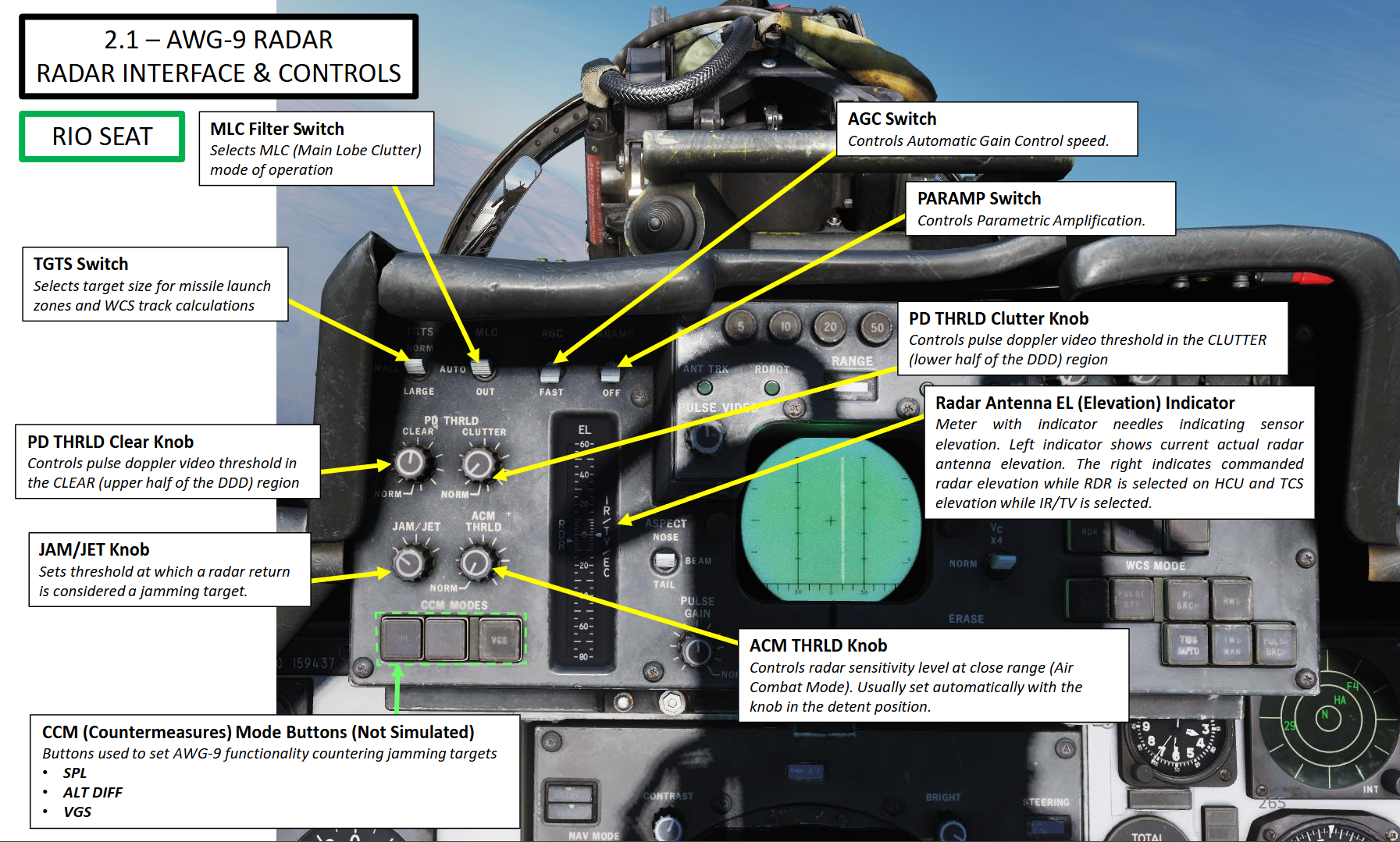
MLC 여과 스위치
MLC (주엽 클러터) 운용 모드를 선택한다.
TGTS 스위치
미사일 발사 구역 및 WCS 추적 계산을 위해 표적 크기를 선택한다.
PD THRLD Clear Knob
CLEAR (DDD의 상단 절반) 부분에서 펄스 도플러 영상 한계점을 제어한다.
JAM/JET Knob
전파 방해를 하는 표적을 고려한 레이더 반사에서의 한계점을 설정한다.
CCM (대응책) 모드 단추 (미구현)
전파 방해를 하는 표적에 대응하는 AWG-9 기능을 설정하는 단추
● SPL
● ALT DIFF
● VGS
ACM THRLD Knob
근거리에서 (Air Combat Mode, 공중 전투 모드) 레이더 민감도를 조절한다. Knob 멈춤쇠에 걸리는 위치인 자동에다가 주로 설정한다.
레이더 안테나 EL (상하각) 표시계
센서 상하각을 나타내는 지침이 있는 계량기. 왼쪽 지시계는 현재의 실제 레이더 안테나 상하각을 보여준다. 오른쪽 지시계는 RDR을 HCU로 선택했을 때는 설정한 레이더 상하각을, IR/TV로 선택했을 때는 TCS 상하각을 나타낸다.
PD THRLD Clutter Knob
CLUTTER (DDD의 하단 절반) 부분에서 펄스 도플러 영상 한계점을 제어한다.
PARAMP 스위치
파라메트릭 증폭 (Parametric Amplification: 파라메트론 진동 원리를 이용하여 신호를 저잡음으로 증폭하는 것)을 제어한다.
AGC (Automatci Gain Control) 스위치
자동 Gain 제어 속도를 조절한다.
[266쪽]
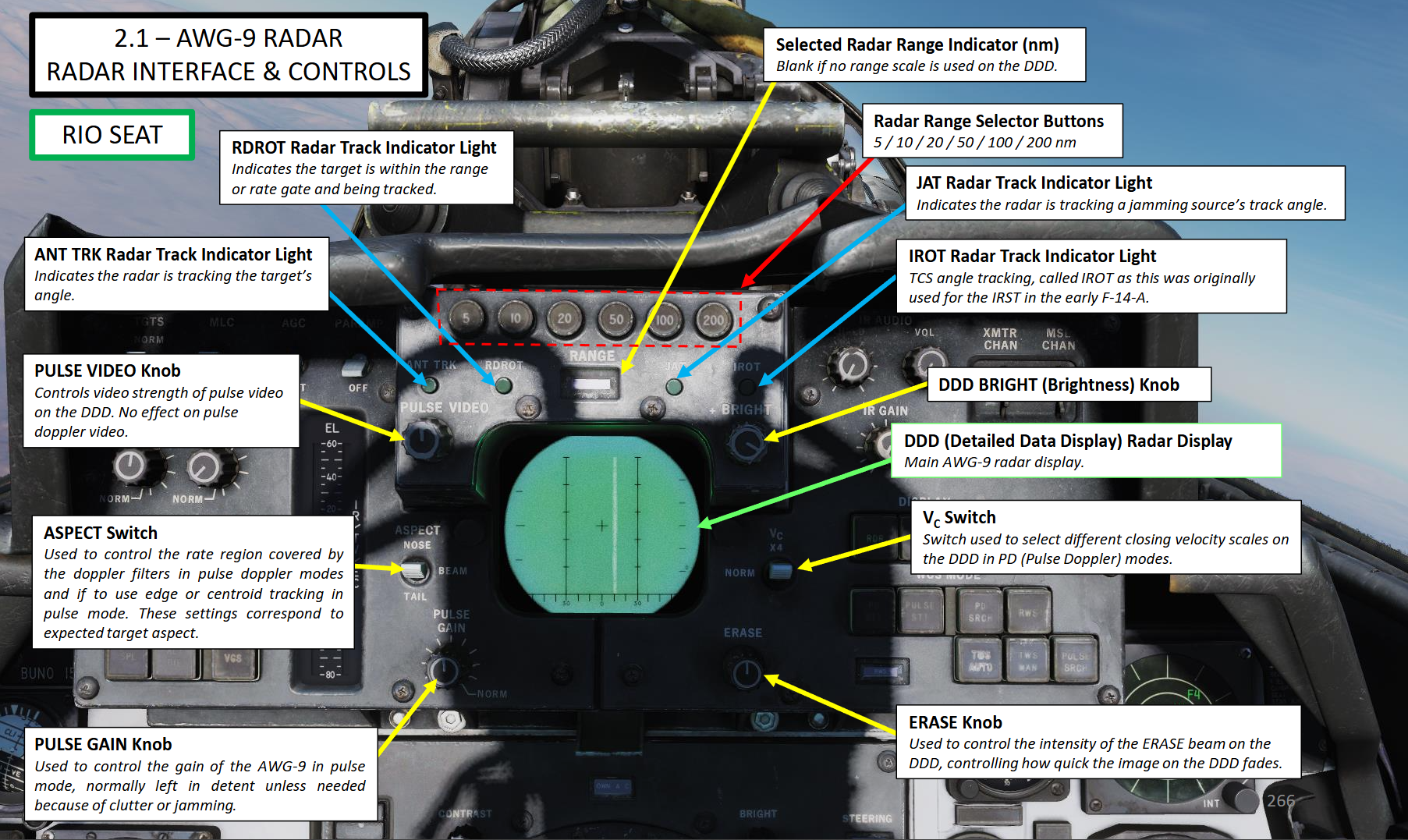
지시등 (파란 화살표 / 왼쪽부터)
ANT TRK 레이더 추적 지시등
레이더가 표적의 각도를 추적하고 있음을 나타낸다.
RDROT 레이더 추적 지시등
표적이 거리나 rate gate 이내에 있고, 추적 중임을 나타낸다.
JAT 레이더 추적 지시등
레이더가 전파 방해의 근원의 항적 각도를 추적하고 있음을 나타낸다.
IROT 레이더 추적 지시등
TCS 각 추적, 초기형 F-14-A에서 IRST에 처음 사용되었기 때문에 IROT로 불린다.
| 각 추적: 전자 방해 방어책에서 광대역 재밍, 점 재밍, 스위프 재밍을 받을 때 반향 신호가 불명확한 잡음원 등을 찾아내는 기법. |
레이더 거리 선택 장치 단추 (빨간 화살표)
5 / 10 / 20 / 50 / 100 / 200 nm
DDD (세부 정보 화면) 레이더 화면 (초록색 화살표)
AWG-9 레이더의 주 화면.
PULSE VIDEO Knob
DDD에서 펄스 영상의 영상 신호 세기(Video Strength)를 조절한다. 펄스 도플러 영상에서는 효과가 없다.
ASPECT 스위치
펄스 도플러 모드에서 도플러 필터에 가려지는 속도 영역을 조절하며, 펄스 모드에서는 Edge 및 중심(Centroid) 추적을 사용하기 위해 사용한다. 이 설정들은 예상되는 표적의 각도 (Aspect)에 해당한다.
PULSE GAIN Knob
펄스 모드에서 AWG-9의 gain을 조절하기 위해 사용하고, 클러터나 재밍 때문에 필요해지지 않는 한 보통은 멈춤쇠가 있는 쪽에 놔둔다.
ERASE Knob
DDD에서의 ERASE Beam (빛줄기)의 세기를 조절한다. DDD에서의 영상이 얼마나 빠르게 사라지는지를 조절한다.
Vc 스위치
PD (펄스 도플러) 모드일 때, DDD 상에서 다른 접근 속도 등급 (Closing Velocity Scale)을 사용하기 위한 스위치.
DDD BRIGHT (밝기) Knob
선택된 레이더 거리 표시계 (nm 단위)
만약 DDD에서 거리 규모를 사용하지 않으면 공백이 나온다.
[267쪽]
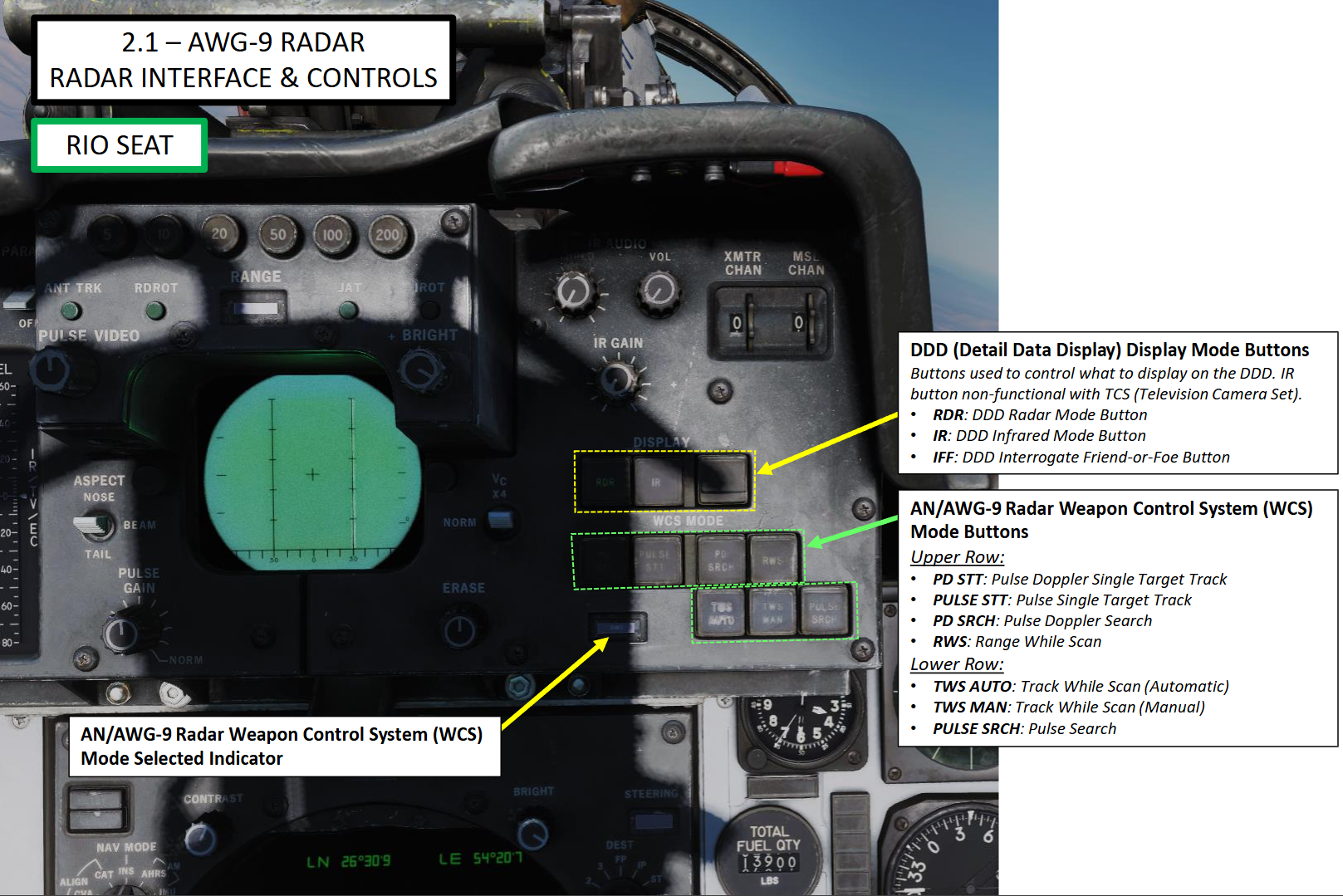
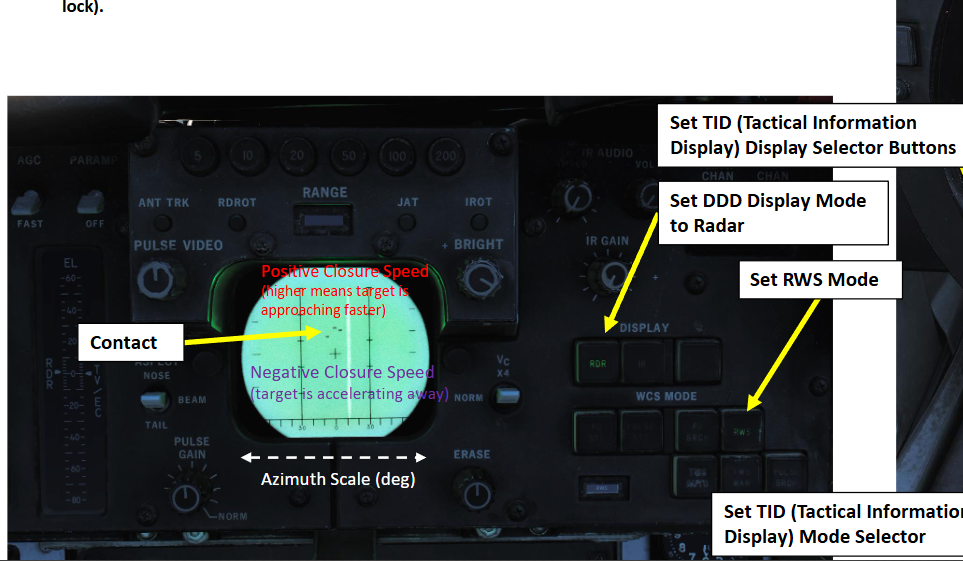
DDD (세부 정보 화면) 화면 모드 단추
DDD에 무엇을 표시할지 정하는 단추. TCS에서의 IR 단추는 작동하지 않는다. (텔레비전 카메라 세트)
● RDR: DDD 레이더 모드 단추
● IR: DDD 적외선 모드 단추
● IFF: DDD 피아식별 단추
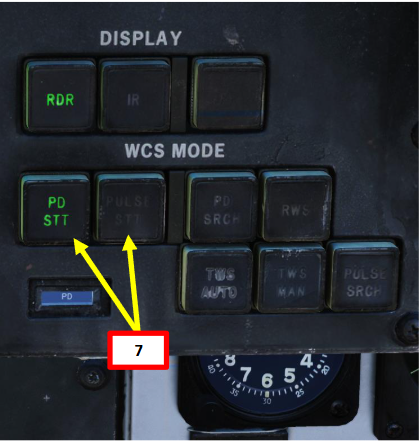
AN/AWG-9 레이더 무기 통제 시스템 (WCS) 모드 단추
윗열:
● PD STT: 펄스 도플러 단일 표적 추적
● PULSE STT: 펄스 단일 표적 추적
● PD SRCH: 펄스 도플러 탐색
● RWS: 탐색 중 거리 측정
아랫열:
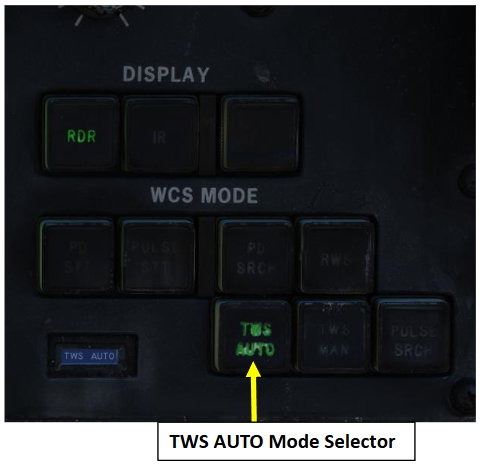
● TWS AUTO: 탐색 중 추적 (자동)
● TWS MAN: 탐색 중 추적 (수동)
● PULSE SRCH: 펄스 탐색
선택된 AN/AWG-9 무기 통제 시스템 (WCS) 모드 표시계
[268쪽]
F-14의 레이더는 접촉한 정보를 DDD(세부 정보 화면)에 표시한다. 현대의 레이더들이 주로 부감 시점으로 정보를 보여주는 반면, DDD는 어떤 레이더 모드를 선택했느냐에 따라 다르게 정보들을 보여준다.
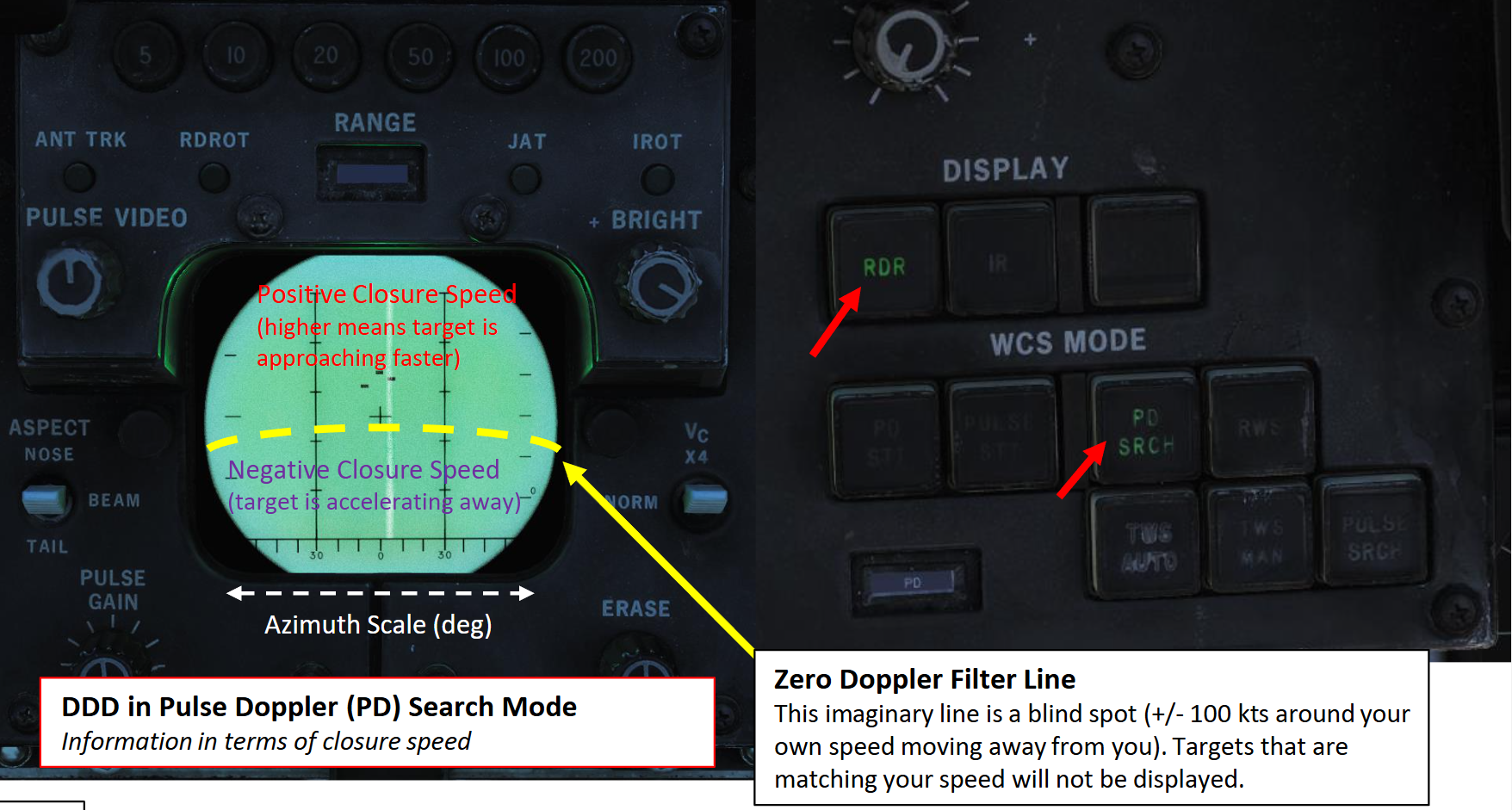
펄스 도플러 (PD) 탐색 모드에서 DDD
접근 속도에 관한 정보
양수의 접근 속도 (더 높을 것일수록 표적이 더 빠르게 접근하고 있음을 의미한다.)
음수의 접근 속도 (표적과의 거리가 계속 멀어지고 있다.)
절대 방위각 눈금 (도 단위)
0 도플러 필터 선 (Zero Doppler Filter Line)
이곳은 사각지대인 가상의 선이다. (현재 탑승 중인 항공기로부터 ± 100 노트로 멀어지고 있음) 자신의 속도와 일치하는 표적은 보여지지 않을 것이다.
만약 "펄스 도플러" 운용 모드 (RWS, TWS, PD 탐색)를 사용 중이라면, DDD 정보는 거리 정보 없이 접촉 한 것의 접근 속도에만 보여줄 것이다. 펄스 도플러 모드는 두 가지의 맹점을 가진다. "0 도플러 필터 선 Zero Doppler Filter Line" (표적과 탑승기 사이에 아주 작은 속도 차이)와 "노치 필터 라인 Notch Filter Line" (표적이 측면으로 있는 중이거나 탑승기와 수직으로 비행하여 노칭하는 중)이다.
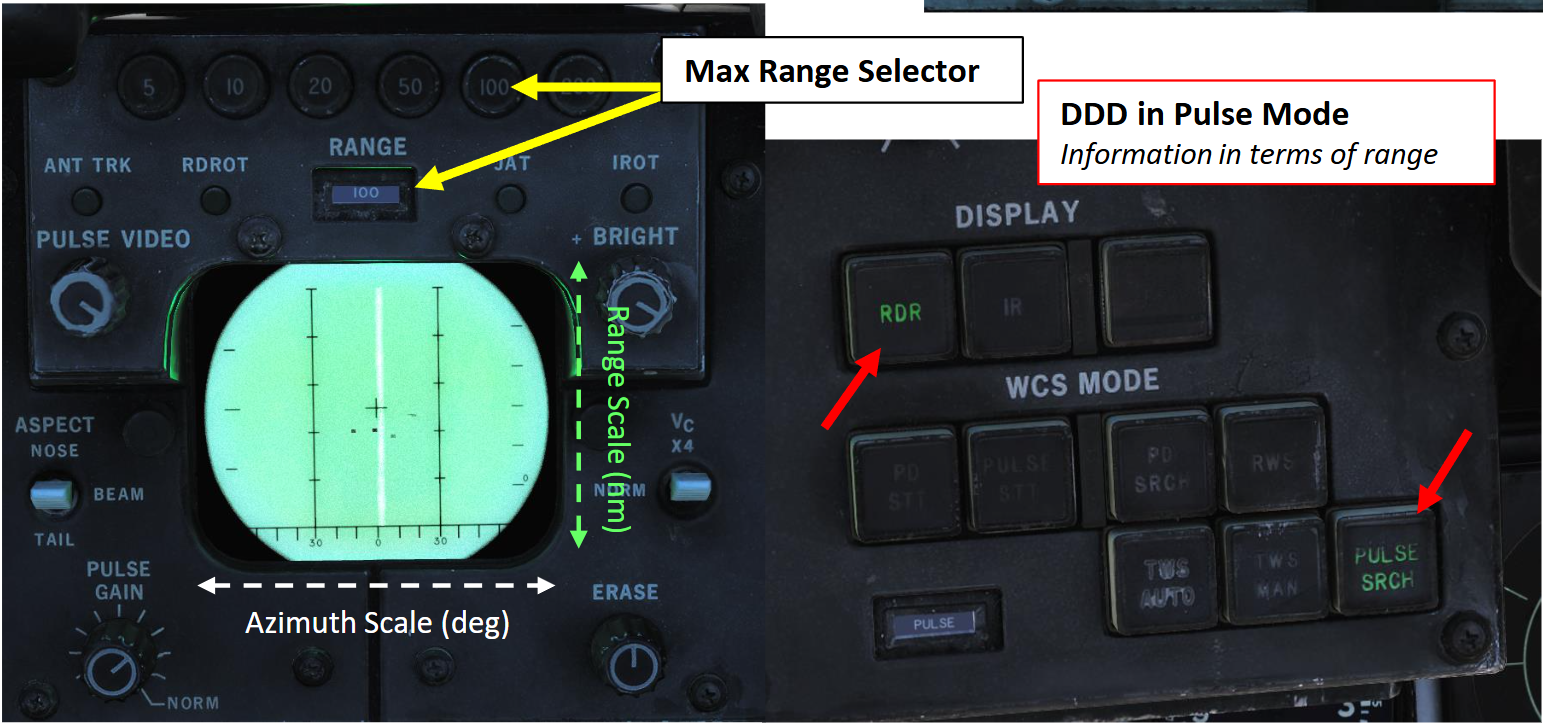
펄스 모드에서 DDD
거리에 관한 정보.
최대 거리 선택 장치
절대 방위각 (도 단위)
만약 "펄스" 운용 모드 (도플러 필터 적용이 없음)를 사용 중이라면, DDD 정보는 접촉한 것의 거리를 보여줄 것이다.
[269쪽]
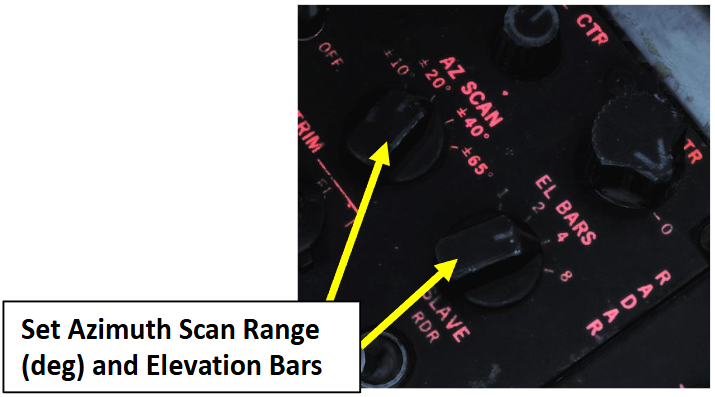
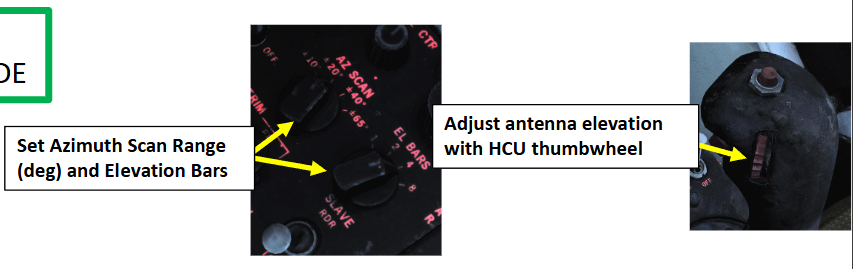
센서 제어반은 레이더 상하각, 탐색 바, 그리고 절대 방위각을 조절한다. 더 많은 바(Bar)를 사용하는 것, 가장 큰 절대 방위각 범위는 더 넓은 범위를 가진다는 것을 뜻하지만, 동시에 탐색 갱신 속도 또한 매우 길어진다는 것을 명심해야 한다.
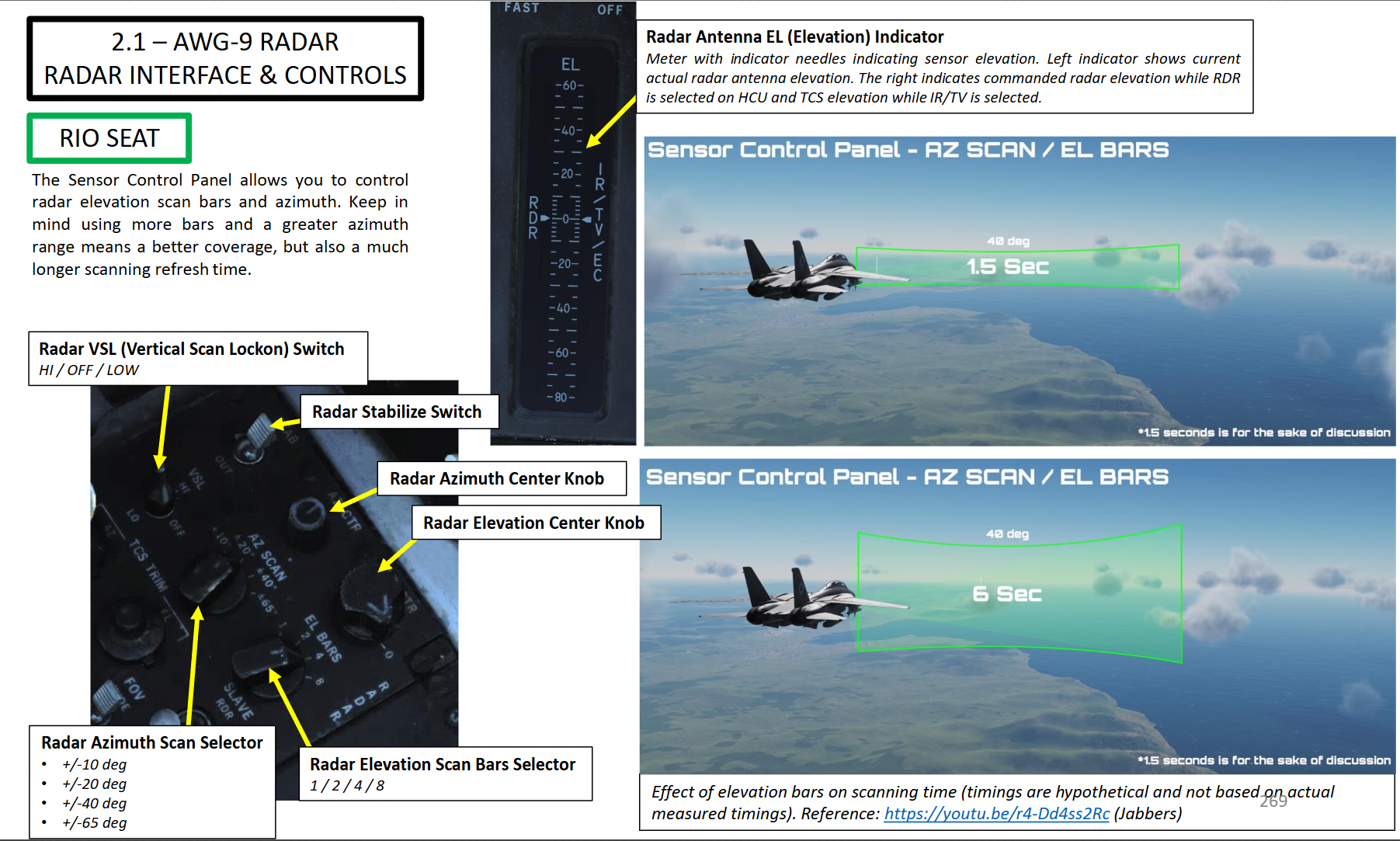
레이더 VSL (수직 탐색 락온) 스위치
HI / OFF/ LOW
레이더 안정 스위치
레이더 절대 방위각 중심 돌림 손잡이
레이더 상하각 중심 돌림 손잡이
레이더 상하각 탐색 바 선택 장치
1 / 2 / 4 / 8
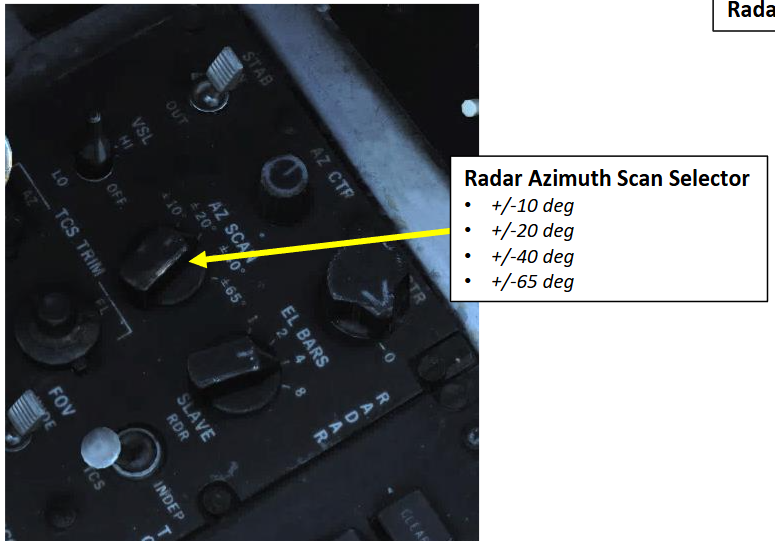
레이더 절대 방위각 탐색 선택 장치
● ± 10도
● ± 20도
● ± 40도
● ± 65도
레이더 안테나 EL (상하각) 표시계
센서 상하각을 표시해주는 지침이 있는 계량기. 왼쪽의 표시계는 현재 레이더 안테나의 실제 상하각을 보여준다. 오른쪽 표시계는 HCU에서 RDR을 선택했을 때는 설정한 레이더 상하각을, IR/TV를 선택했을 때는 설정한 TCS 상하각을 보여준다.
탐색 속도 상하각 바의 영향 (예시 사진에 적힌 시간은 실제로 측정된 시간이 아니라 가상의 시간이다.)
참고: https://youtu.be/r4-Dd4ss2Rc?si=iBk1QVm_-IDQRvci (Jabbers)
[270쪽]
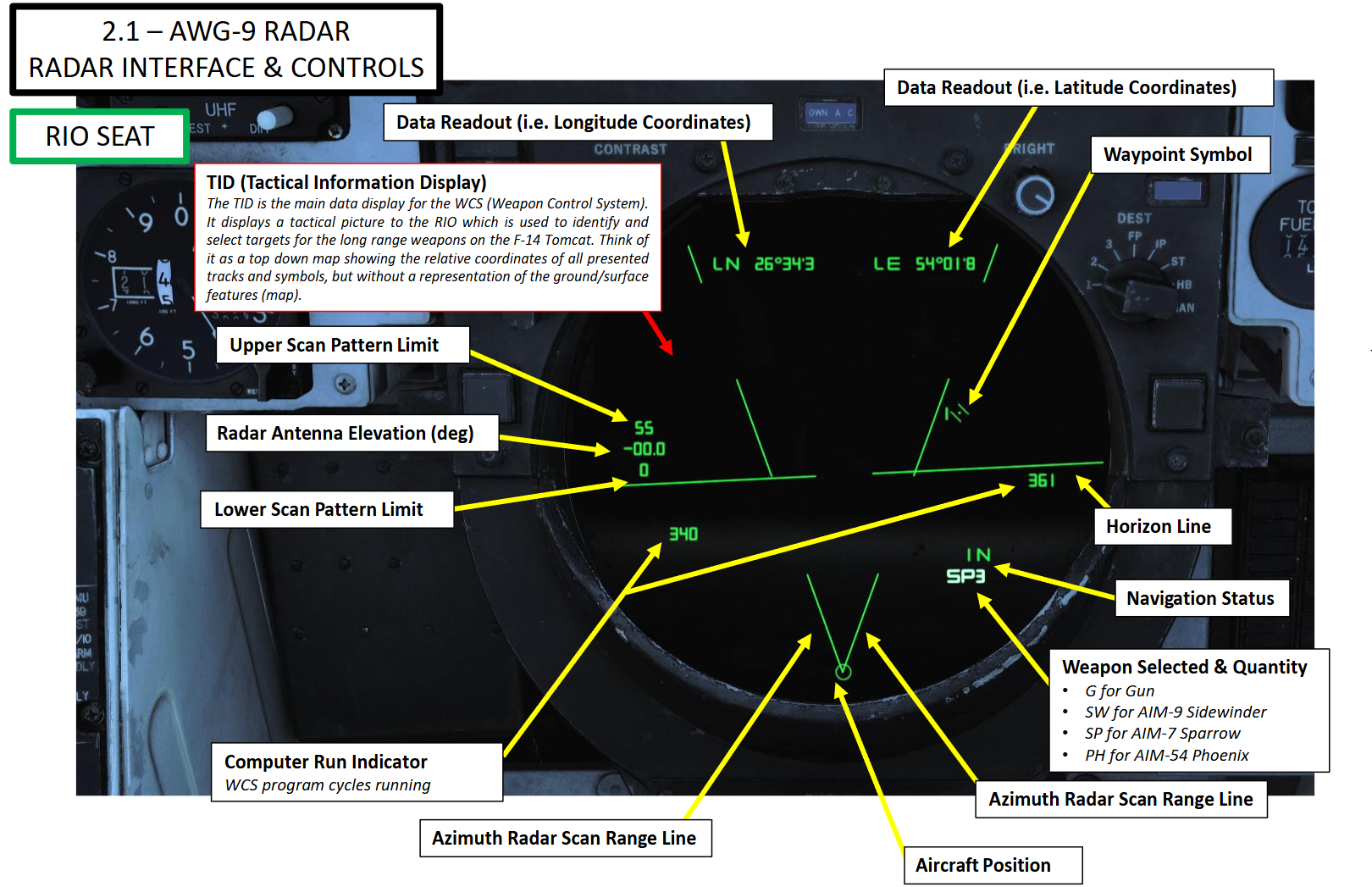
TID (전술 정보 화면)
TID는 WCS (무기 통제 시스템)의 주요 정보 화면이다. 이 화면은 RIO F-14의 장거리 무기를 사용하기 위해 표적을 식별하고 선택할 수 있게 하는 전술 그림을 보여준다. 이것은 존재하는 지상/지형 특징 (지도)의 표시를 제외하고, 모든 항적과 기호의 상대 좌표를 보여주는 부감도로 볼 수 있다.
(이하 반시계 순으로)
상단 탐색 패턴 한계
레이더 안테나 상하각 (도 단위)
하단 탐색 패턴 한계
컴퓨터 작동 표시계
WCS 프로그램이 돌아가고 있음.
절대 방위각 레이더 탐색 범위 선
항공기 위치
절대 방위각 레이더 탐색 범위 선
선택된 무장 & 수량
● G는 기총
● SW는 AIM-9 SIdewinder
● SP는 AIM-7 Sparrow
● PH는 AIM-54 Phoenix
항법 상태
수평선
중간 경로점 기호 (Waypoint)
정보값 (즉, 위도 좌표)
정보값 (즉, 경도 좌표)
[271쪽]
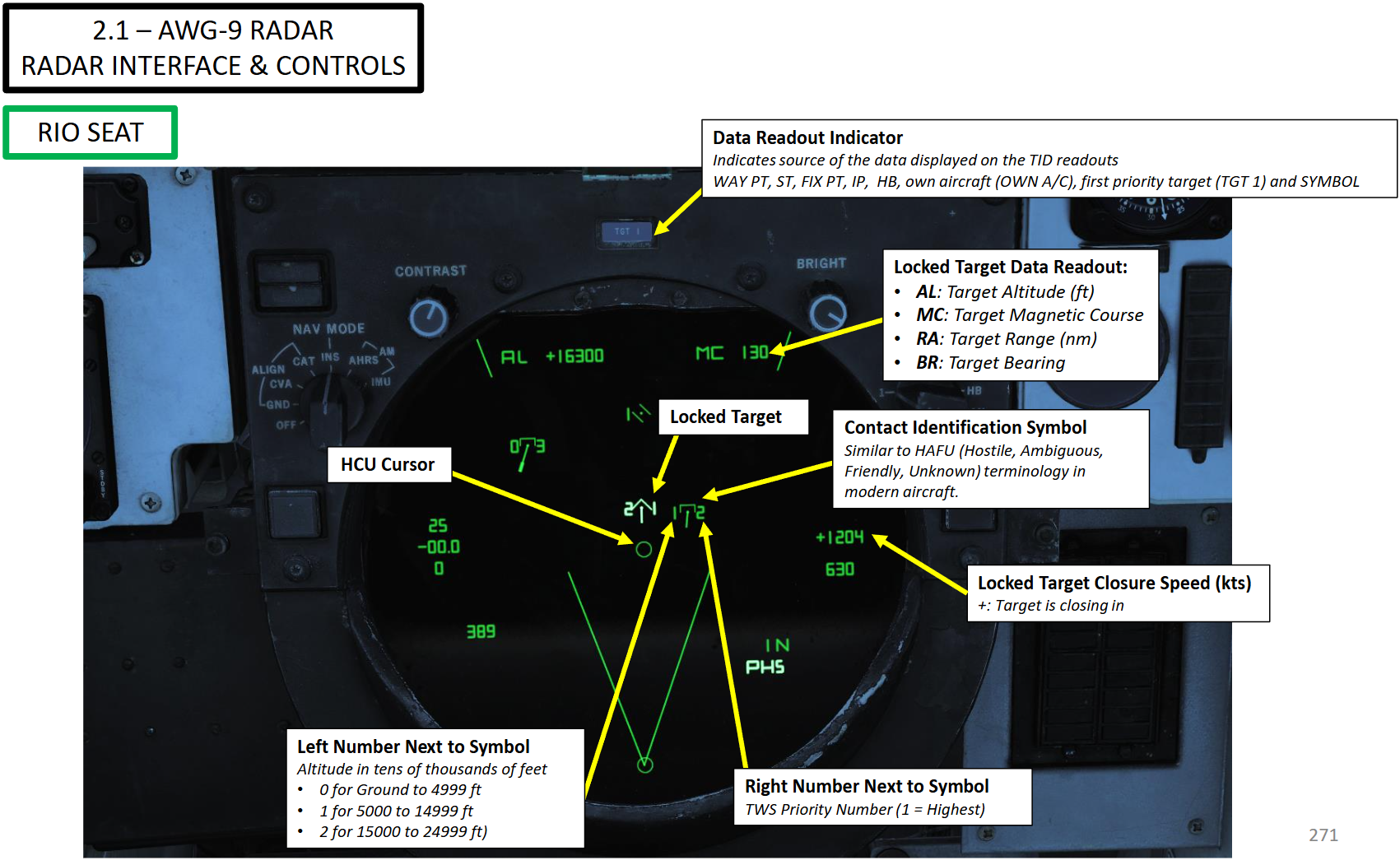
HCU 커서
락온 표적 Locked Target
기호 왼쪽 옆의 숫자
Feet 단위의 고도.
● 0은 지상에서 4999 ft.
● 1은 5,000에서 14,999 ft.
● 2은 15,000에서 24,999 ft.
기호 오른쪽 옆의 숫자
TWS 우선 순위 번호 (1 = 가장 높음)
락온 표적 접근 속도 (kts 단위)
+: 표적이 가까워지고 있는 중.
접촉 식별 기호 (Contact Identification Symbol)
현대 항공기의 HAFU (적, 불분명, 아군, 미상) 전문 용어와 비슷하다.
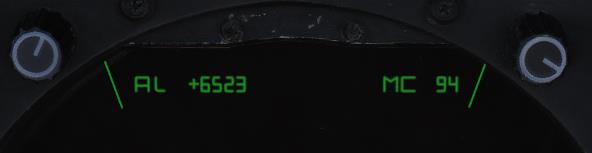
락온 표적 정보 표시값:
● AL: 표적 고도 (Target Altitude, ft 단위)
● MC: 표적 자침로 (Target Magnetic Course)
● RA: 표적 거리 (Target Range, nm 단위)
● BR: 표적 상대 방위각 (Target Bearing)
정보 값 표시계
TID 표시값에 보여지는 정보의 출처를 나타낸다.
WAY PT, ST, FIX PT, IP, HB, 현재 항공기 (OWN A/C), 최우선 표적 (TGT 1) 그리고 기호.
[272쪽]
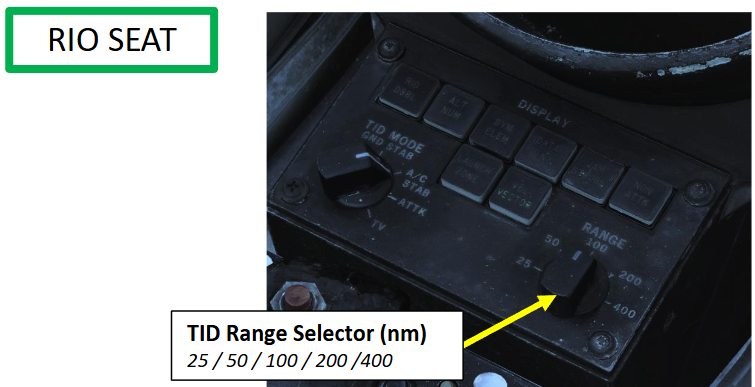
TID 거리 선택 장치 (nm 단위)
25 / 50 / 100 / 200 / 400
레이더 절대 방위각 탐색 선택 장치
● ± 10도
● ± 20도
● ± 40도
● ± 65도
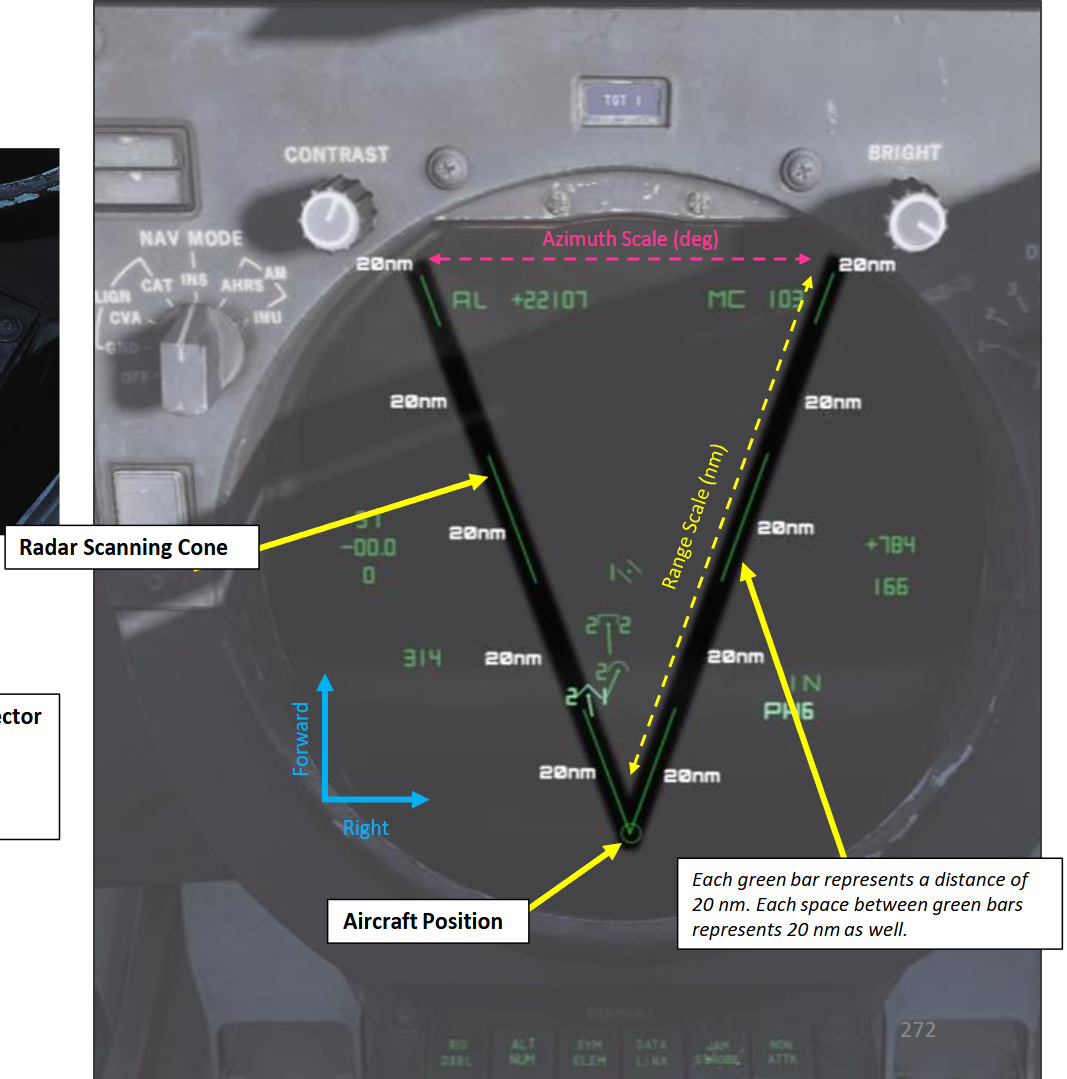
레이더 탐색 원뿔
항공기 위치
거리 범위 (nm 단위)
녹색 막대 각각은 20 nm 의 거리를 나타내고, 녹색 막대 사이의 공간 또한 각각 20 nm를 나타낸다.
절대 방위각 범위 (도 단위)
전 ↑
방 →
오른쪽
[273쪽]
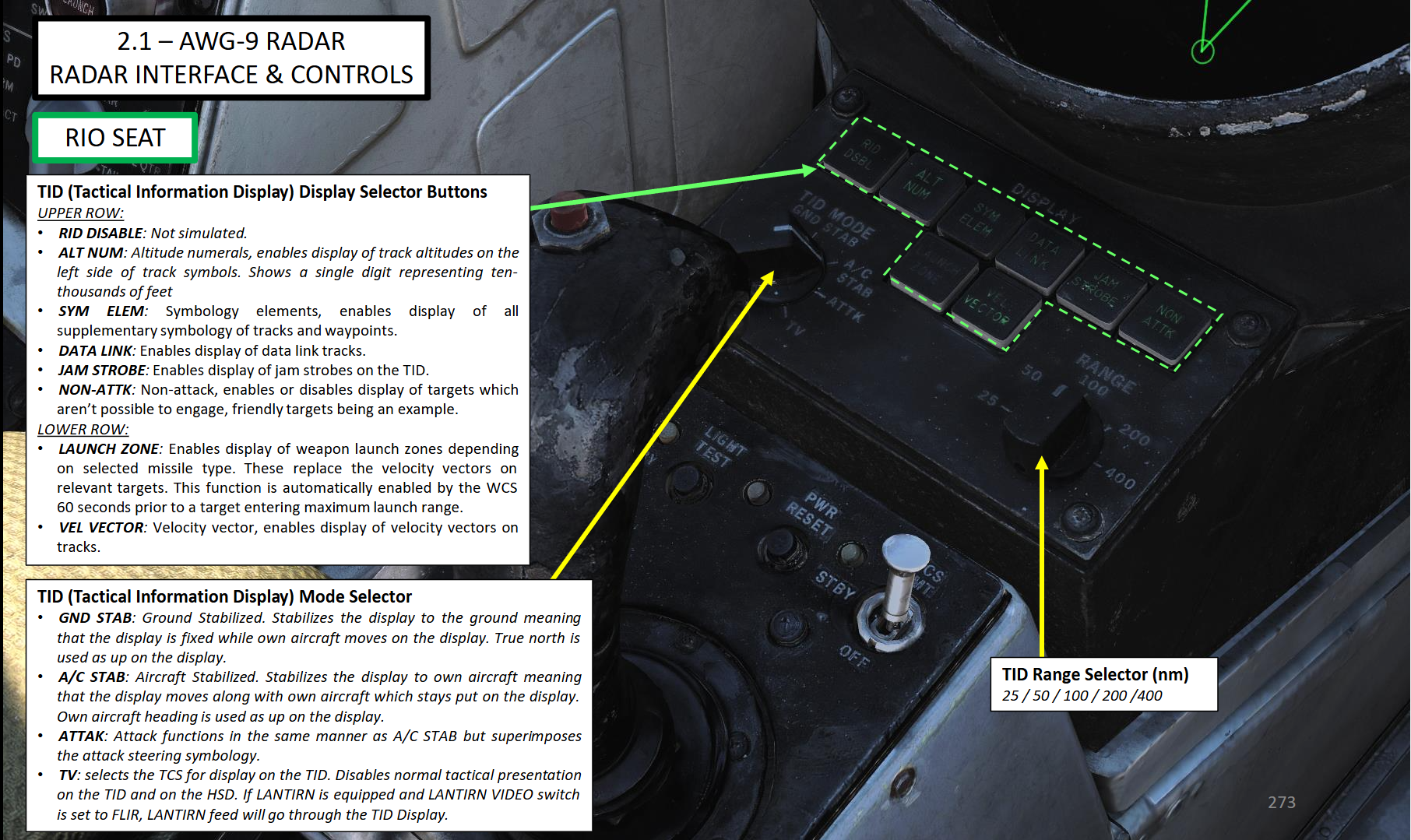
| TID (전술 정보 화면) 화면 선택 장치 단추 윗열: ● RID DISABLE: 미구현 ● ALT NUM: 고도 숫자, 기호 왼쪽 항적 고도 표시를 활성한다. 단일 숫자로 만 단위의 feet를 나타낸다. ● SYM ELEM: 기호 요소(Symbology Elements), 항적 및 Waypoint의 모든 보충적인 기호의 표시를 한다. ● DATA LINK: 데이터 링크 항적을 표시한다. ● JAM STROBE: TID에 JAM(전파 방해) 섬광등을 표시한다. ● NON-ATTK: Non-Attack, 예를 들자면 아군과 같이, 교전 가능성이 없는 표적의 표시를 켜거나 끌 수 있다. 아랫열: ● LAUNCH ZONE: 선택한 미사일 유형의 따라 무장 발사 구역을 표시한다. 이는 관련된 표적에서 속도 벡터를 대체한다. 이 기능은 표적이 최대 발사 거리에 들어오기 60초 전에, WCS가 자동으로 활성화한다. ● VEL VECTOR: 속도 벡터, 항적에 속도 벡터 표시를 한다. |
| TID (전술 정보 화면) 모드 선택 장치 단추 ● GND STAB: 지상 고정. 화면을 지상에 안정시킨다. 즉, 화면에서 현재 항공기가 움직이는 동안에 화면은 고정된 상태가 된다. 화면의 위는 진북(true north, 眞北)이 된다. ● A/C STAB: 항공기 고정. 화면을 현재 항공기에 안정시킨다. 화면에 현재 항공기는 가만히 있고, 그것을 따라 화면이 (화면의 표시되는 것들이) 움직인다. 화면의 위는 현재 항공기의 기수 방향이 된다. ● ATTAK: A/C STAB와 같지만 공격 조향 기호가 덧붙어지는 공격 기능. ● TV: TID에 화면으로 TCS를 선택한다. TID 및 HSD에서 일반적인 전술 표시가 비활성화된다. LANTIRN이 장착되고 LANTIRN VIDEO 스위치가 FLIR로 설정되어 있다면, LANTIRN 자료 화면이 TID에 나타난다. |
TID 거리 선택 장치 (nm 단위)
25 / 50 / 100 / 200 / 400
[274쪽]
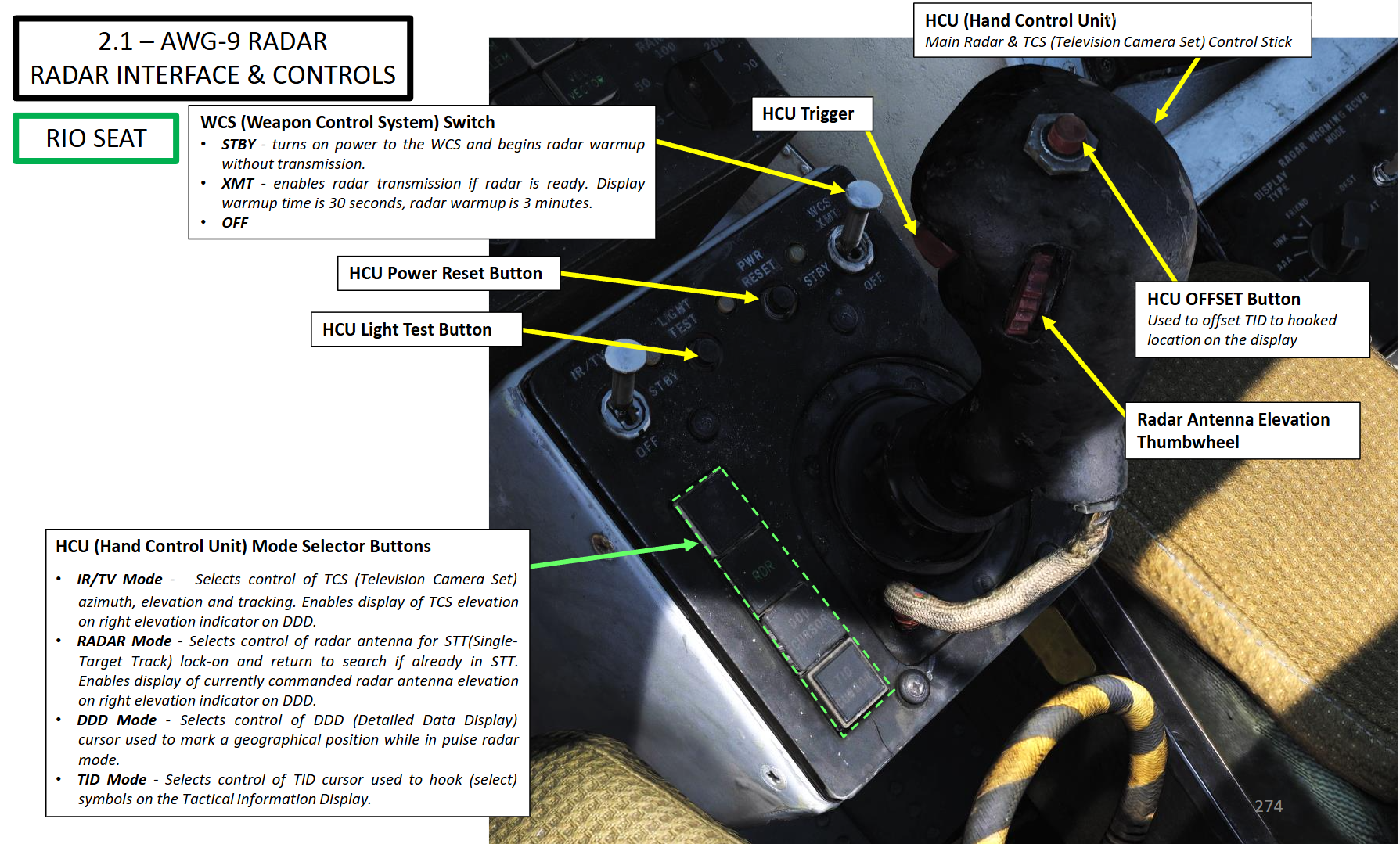
WCS (무기 통제 시스템) 스위치
● STBY - WCS에 전원을 켜고, 송신 없이 레이더의 예열을 시작한다.
● XMT - 레이더가 준비되었다면 레이더 송신을 활성화한다. 화면 예열은 30초, 레이더 예열은 3분이다.
● OFF
HUC 전원 초기화 단추
HCU 조명 점검 단추
HCU 방아쇠
HCU (수동 조작 장치)
레이더 & TCS (텔레비전 카메라 세트) 주요 조종간
HCU OFFSET 단추
화면에서 정해둔 위치에 TID offset 하기 위해 사용한다.
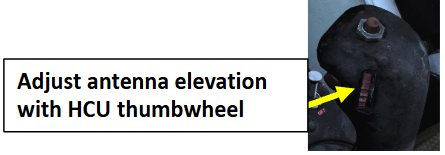
레이더 안테나 상하각 지동륜
HCU (수동 조작 장치) 모드 선택 장치 단추
● IR/TV 모드 - TCS (텔레비전 카메라 세트) 절대 방위각, 상하각 및 추적 제어를 선택한다. DDD의 오른쪽 상하각 표시계의 TCS 상하각 표시를 활성화한다.
● RADAR 모드 - 단일 표적 추적 락온을 위한 레이더 안테나 제어를 선택하고, 이미 STT 상태라면 탐색으로 되돌린다. DDD의 오른쪽 상하각 표시계의 현재 설정한 레이더 안테나 상하각의 표시를 활성화한다.
● DDD 모드 - 펄스 레이더 모드인 동안 지형 위치를 표시하기 위해 사용하는 DDD (세부 정보 화면) 커서의 제어를 선택한다.
● TID 모드 - TID (전술 정보 화면)에서 기호를 hook (선택)하기 위해 사용하는 TID 커서의 제어를 선택한다.
[275쪽]
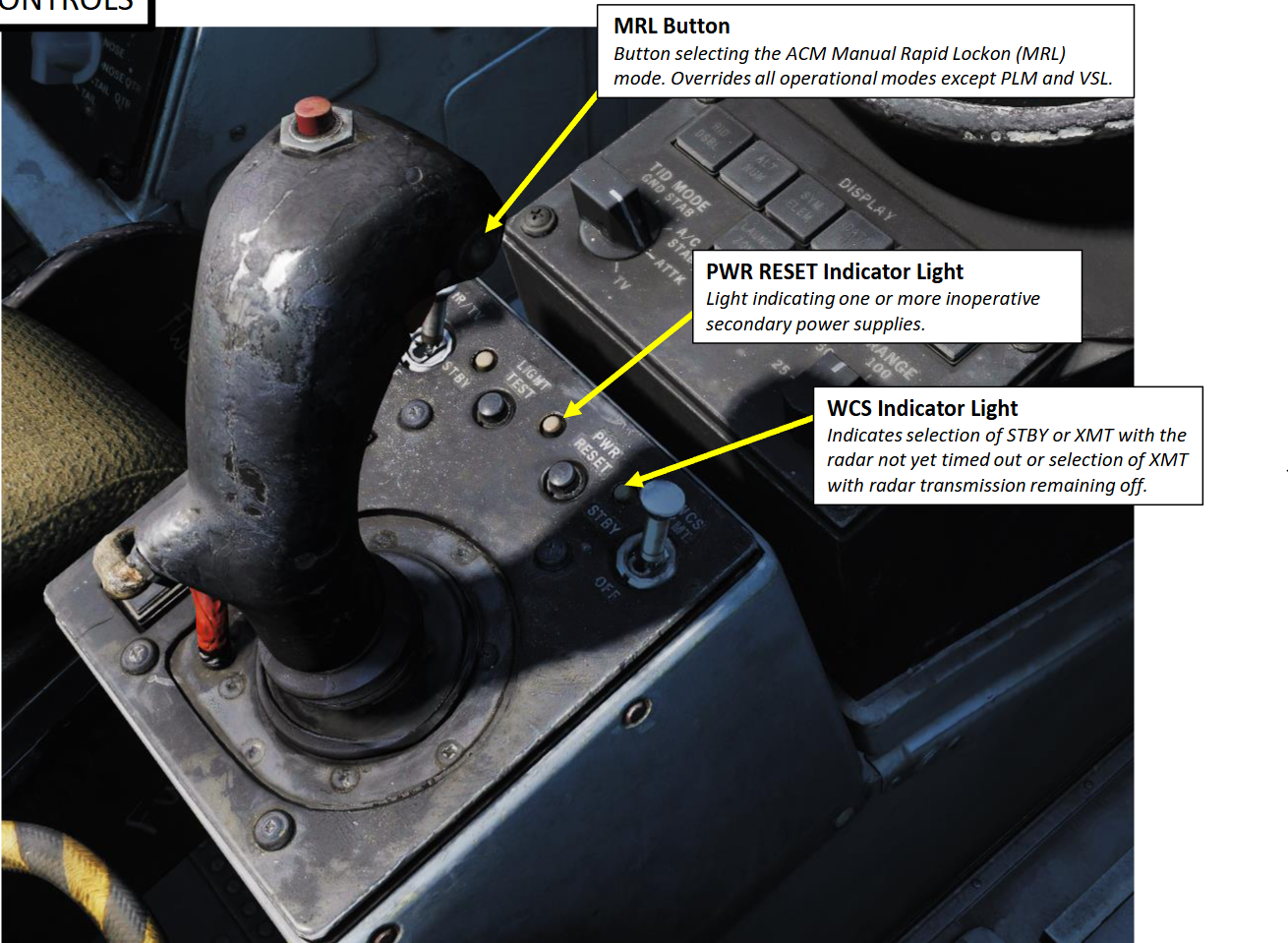
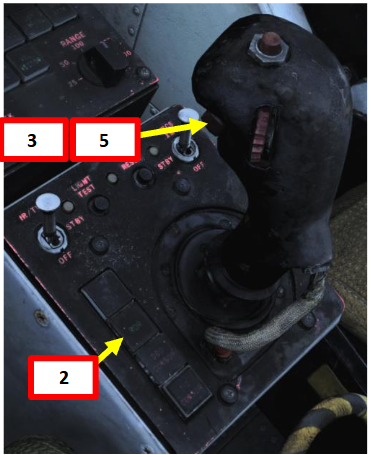
MRL 단추
ACM 수동 신속 락온 (MRL, Manual Rapid Lockon) 모드를 선택하는 단추. PLM 및 VSL을 제외한 모든 운용 모드보다 우선시된다.
PWR RESET 표시등
하나 혹은 그 이상의 예비 전력 공급이 작동하지 않음을 나타내는 조명
WCS 표시등
레이더가 아직 시간 초과(time out)되지 않았을 때 STBY 혹은 MXT의 선택 혹은 레이더 송신이 off로 되어있는 상태일 때 XMT의 선택을 나타낸다.
9.2.2. 레이더 주요 모드
[276쪽]
| 레이더 운용 모드 (빨간색: 조종사 제어 / 초록색: RIO 제어) |
기능 | 무장 능력 | 탐지 거리 | ||
| BVR (Beyond Visual Range, 시계외) (10 nm 이상) |
펄스 | 펄스 탐색 | 중거리 탐색 및 탐지, 예비 공대지 | 전방 조준 (Boresight) 미사일 | 60 nm |
| 펄스 STT (단일 표적 추적) | 단거리에서 중거리 단일 표적 추적 및 미사일 발사 | 기총 및 미사일, CW에서 AIM-7 및 Active 발사에서 AIM-54 | 50 nm | ||
| 펄스 도플러 | 펄스 도플러 탐색 | 장거리 탐색 및 탐지 | 전방 조준 (Boresight) 미사일 | 110 nm | |
| RWS (탐색 중 거리 측정) | 장거리 탐색, 탐지, 조준 | 90 nm | |||
| TWS (탐색 중 추적) | 장거리 탐색, 탐지, 타중 표적 추적 및 미사일 유도 | AIM-54, 타중 표적 능력. | 90 nm | ||
| 펄스 도플러 STT (단일 표적 추적) | 장거리 탄일 표적 추적 및 미사일 유도 | 기총과 모든 미사일. PD 및 CW에서 AIM-7과 PD 및 Active에서 AIM-54 | 90 nm | ||
| WVR (Within Visual Range, 시계내) (10 nm 미만) |
ACM (Air Combat Mode, 공중 전투 모드) | PLM (조종사 락온 모드) | 단거리 탐색 및 탐지 | 기총 및 모든 미사일 | 5 nm |
| VSL High/Low (수직 탐색 락온) | 단거리 탐색 및 탐지 | 기총과 모든 미사일. VSL High 혹은 VSL Low 모드는 RIO가 설정하지만, 락온의 수행은 조종사가 한다. | 5 nm | ||
| PAL (조종사 자동 락온) | 단거리 탐색 및 탐지 | 기총 및 모든 미사일 | 15 nm | ||
| MRL (수동 신속 락온) | 단거리 탐색 및 탐지 | 기총과 모든 미사일. 드물게 DDD에서 보이는 것과 캐노피 밖에서 실제로 보여지는 것을 연관시키기 어렵기 때문에 사용되기도 한다. | 5 nm | ||
[277쪽]
레이더는 다음과 같은 주요 모드들이 있다.
펄스 도플러 및 펄스 운용 모드가 포함된 BVR (Beyond Visual Range, 시계 외 거리. 장거리 교전에 사용한다.)
ACM (Air Combat Maneuvering, 공중 전투 기동. 근접 항공 교전에 사용한다.)
요약본
펄스 모드:
● 펄스 운용 모드에서, AN/AWG-9 은 펄스 도플러 여과를 사용하지 않으므로 모든 각도에서 표적을 탐지할 수 있고, 기초적인 지상 지형 지도 제작도 (Ground Mapping) 할 수 있다. 이 모드의 장점은 표적을 포착하는 데에 상대 속도를 필요로 하지 않기 때문에 표적이 Notch (도플러 레이더 회피)를 할 수 없다는 점이다. 하지만 단점으로 원치 않은 지상 반사와 실제 표적을 구분할 쉬운 방법이 없는데 이는 항공기가 지상 근처에서 지표면 잡음에 숨을 수 있다는 뜻이 된다. 이것과 일반적인 배경 잡음으로부터 실제 표적을 구분하는 시도의 어려움이 증가했기 때문에, 그 결과 펄스 모드에서의 거리는 펄스 도플러 모드에서의 거리보다 짧다.
● 레이더는 두 개의 펄스 모드를 가지고 있는데, 펄스 탐색(Pulse Search)와 펄스 단일 표적 추적 (Pulse Single Target Track, P STT)이다.
● 펄스 모드는 TID에는 아무것도 보여주지 않고, 오직 DDD에만 보여준다. TID는 오직 데이터 링크 접촉과 중간 경로 (Waypoint)만 보여준다.
펄스 도플러 모드:
● 펄스 도플러 모드에서는 도플러 필터로 원하지 않는 반사를 걸러내어 표적 탐지를 강화하고 그로 인해 탐지 거리가 늘어난다. 이 모드의 장점을 말하자면, 표적을 더 먼 거리에서 탐지할 수 있고, 지상 반사 대부분이 없어지며 AIM-7과 AIM-54미사일에 미사일 유도 명령을 보낼 수 있다는 것이다. AIM-54는 TWS와 STT에서, 그리고 AIM-7은 오직 STT에서만. 이 모드의 가장 큰 단점은 상대 속도가 0으로 반사되는 표적은 걸러지기 때문에 Notching (레이더 회피)에 민감해진다는 것이다.
● AN/AWG-9의 펄스 도플러 모드는 펄스 도플러 탐색, 탐색 중 거리 측정 (RWS), 탐색 중 추적 (TWS), 그리고 펄스 도플러 STT들이 있다. 3개의 탐색 모드는 흔한 DDD 화면을 갖는데, 주요한 차이점으로 펄스 도플러 탐색은, 다른 두 모드가 추적 중인 표적의 사거리 표시를 활성화하기 위해서 FM-ranging 처리를 필요로 하기 때문에, 약간 더 긴 사거리를 가진다는 것이다.
ACM 모드:
● AN/AWG-9은 세 가지의 ACM 획득 모드가 있다. 조종사 락온 모드 (PLM), 수직 탐색 락온 (VSL) 그리고 수동 신속 락온 (MRL)이다.
● ACM 모드들은 우선 순위로 나열되는데, 우선 순위가 높은 모드들은 더 낮은 우선 순우의 모드들보다 우선시 된다. 이는 PLM은 항상 VSL 및 그 이하의 모드보다, VSL은 PLM을 제외하고 PAL과 그 이하 모드들보다 우선시 되는 식이다.
● 모든 모드는, 조종사가 해제할 때까지 시행되는 PLM을 제외하고, RIO가 HCU에서 Half-action 하고 놓는 것으로 종료된다.
9.2.3. 펄스 모드
9.2.3.1 펄스 탐색
[278쪽]
펄스 운용 모드에서, AN/AWG-9 은 펄스 도플러 여과를 사용하지 않으므로 모든 각도에서 표적을 탐지할 수 있고, 기초적인 지상 지형 지도 제작도 (Ground Mapping) 할 수 있다. 이 모드의 장점은 표적을 포착하는 데에 상대 속도를 필요로 하지 않기 때문에 표적이 Notch (도플러 레이더 회피)를 할 수 없다는 점이다.
하지만 단점으로 원치 않은 지상 반사와 실제 표적을 구분할 쉬운 방법이 없는데 이는 항공기가 지상 근처에서 지표면 잡음에 숨을 수 있다는 뜻이 된다. 이것과 일반적인 배경 잡음으로부터 실제 표적을 구분하는 시도의 어려움이 증가했기 때문에, 그 결과 펄스 모드에서의 거리는 펄스 도플러 모드에서의 거리보다 짧다.
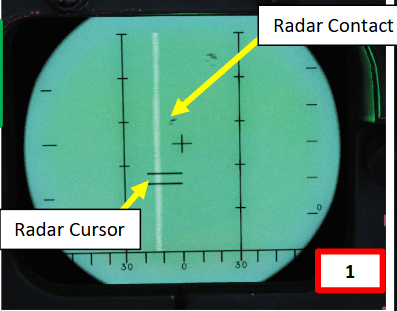
펄스 탐색 모드 (Pulse Search Mode)에서 화면에는 레이더의 탐색과 사라짐의 시각적인 표현과 레이더의 반사만을 보여진다. 이 모드에서 화면은 거리 vs 방위각 (Azimuth)를 보여주며 AIM-54 유도를 할 수 없다. (20 nm로 한정됨.) 또한 TID에 정보를 보여주지도 않는다. 펄스는 표적이 레이더 회피 기동 (notching) 하는 동안 우리가 계속 추적하고자 할 때 유용하다.
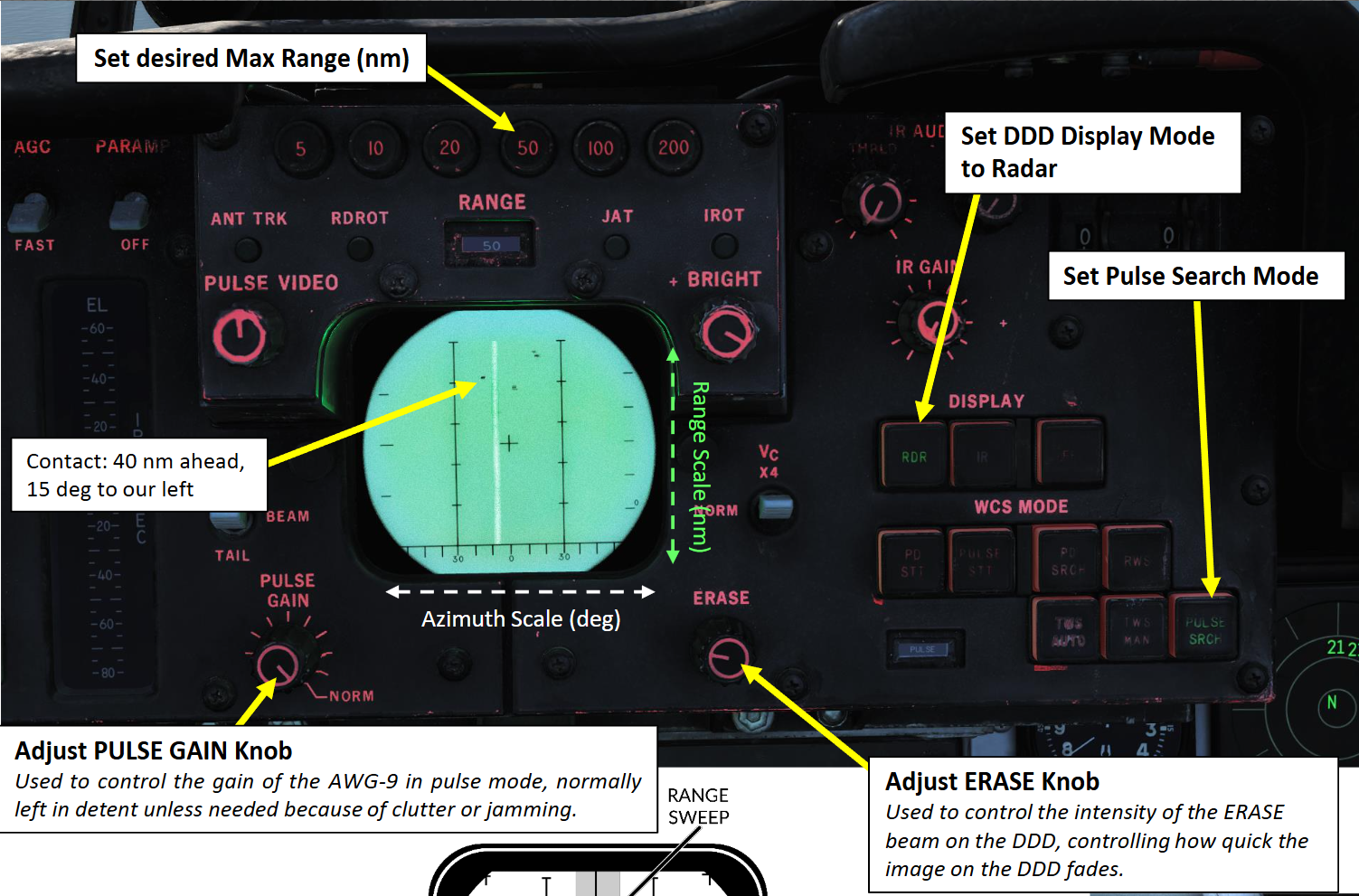
원하는 최대 사거리 (nm 단위) 설정
DDD 화면 모드를 레이더로 설정
Pulse Search 모드 설정
PULSE GAIN 돌림 손잡이 조정
펄스 모드에서 AWG-9의 gain을 조절하기 위해 사용한다. 보통 전파 방해 (Jamming)나 전파 잡음 (Clutter) 때문에 필요로 하지 않는 한 멈춤쇠가 있는 곳에 놔둔다.
ERASE 돌림 손잡이 조정
DDD 상의 ERASE(삭제) 막대의 강도를 조절하기 위해 사용한다. DDD의 영상이 얼마나 빠르게 사라질지를 조절한다.
접촉: 40 nm 전방, 우리 왼쪽에서 15도
방위각 탐색 거리 (도 단위) 및 상하각 바 설정
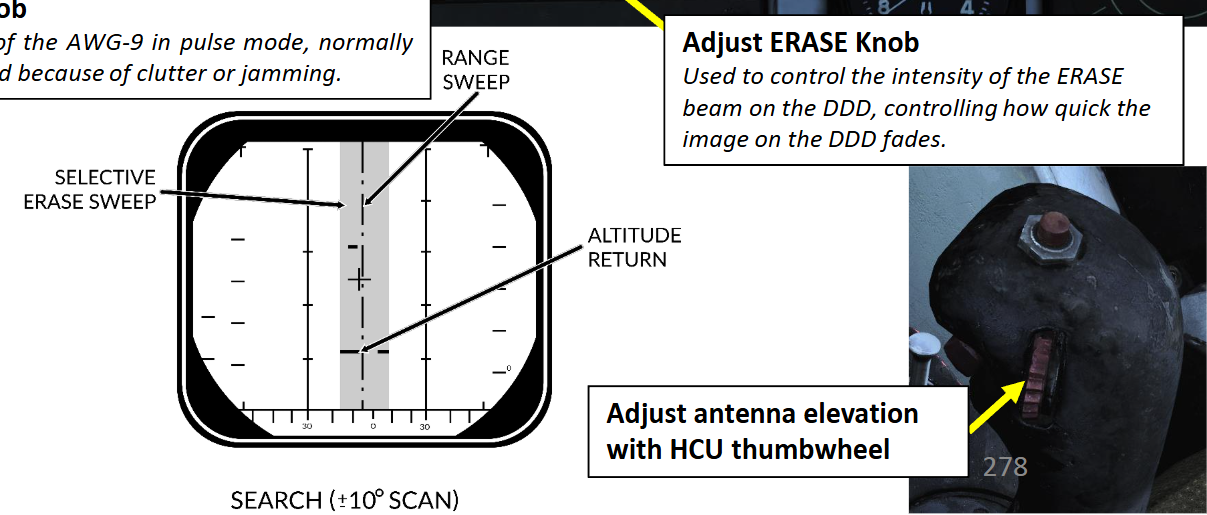
탐색 (±10º 탐색)
지움 훑음, 거리 훑음, 고도 훑음
HCU 지동륜으로 안테나 상하각을 조정한다.
9.2.3.2 펄스 STT 모드
[279쪽]
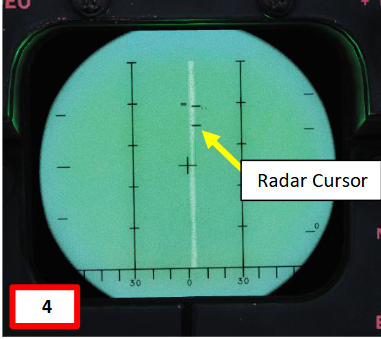
펄스 STT는 단일 표적을 추적하기 위해 사용한다. 펄스 탐색 모드와 같이 이것은 레이더 회피 (Notching)에 민감하지 않지만 지상 전파 잡음에는 민감하다. STT모드가 표적을 추적하기 위해 거리 게이트 (Range Gates)를 사용한다는 사실은 지상 잡음에 덜 민감함을 의미하지만 지상 반사가 거리 게이트에 들어올 만큼 충분히 지상과 가까운 표적은 락온을 떨처낼 수도 있다.
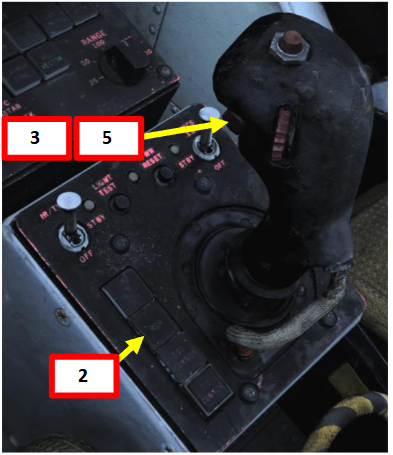
펄스 모드에서 펄스 STT로 레이더 락을 얻기 위해서는:
1. 펄스 탐색 모드에 있는지 확인한다.
2. RDR HCU 모드를 선택한다.
3. 첫 번째 HCU 방아쇠 (Half-action)를 누르고 유지한다. DDD에 레이더 커서가 나타날 것이다.
4. HCU 조종간을 사용하여 커서를 원하는 표적 위로 옮긴다.
5. 원하는 접촉(Contact) 위에 커서가 올라간 후, 두 번째 HCU 방아쇠 (Full-Action)을 눌러서 표적을 락온한다.
6. 접촉(Contact)가 락온 됐다면, 자동으로 DDD가 펄스 STT 모드로 전환한다.
7. 표적을 락온 해제하려면 HCU 첫 번째 방아쇠를 누른다.

● 성공적인 추적은 DDD에서 ANT TRK 와 RDROT 표시등으로 나타나는데 안테나가 표적을 추적하고 있으며 표적이 거리 게이트 안에 있음을 의미한다.
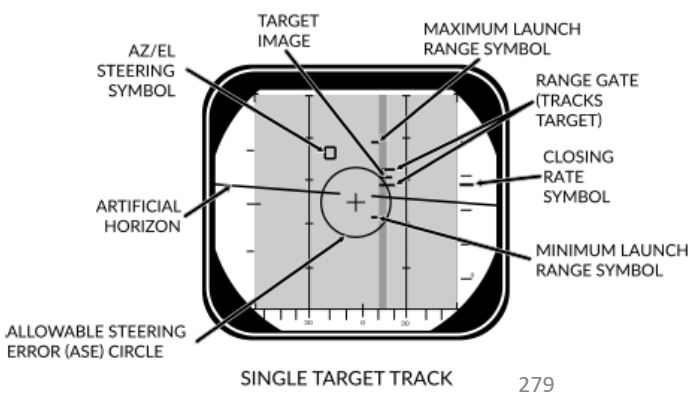
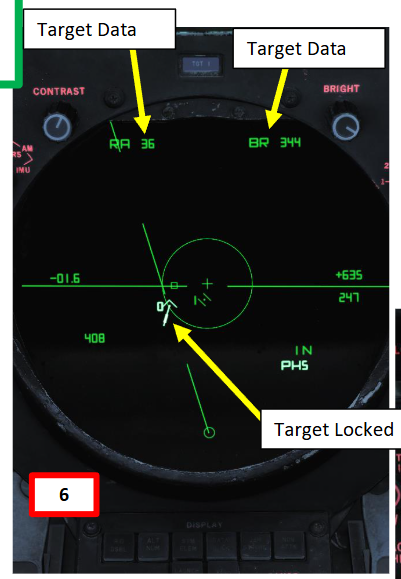
표적상 (Target Image)
AZ/EL (Azimuth, Elevation 방위각, 고도) 조향 기호
가상 수평선
Allowable Steering Error (ASE) Circle 허용되는 최대 조향 오차 원형
→ 표적에 미사일을 유도할 때 허용 가능한 최대 조향 오차 범위를 보여주는데 표적이 가까우면 원이 커지고 멀면 작아진다.
최소 발사 거리 기호
접근 속도 기호
거리 게이트 (표적을 추적한다.)
최대 발사 거리 기호
● (뭔 문장을 이딴 식으로 쓰는 거야.) 화면은 정확한 방위각 (Azimuth)와 거리를 보여준다. 또한 표적으로부터의 레이더 반사, 추적 게이트 (Range 혹은 Range rate gate), 접근율을 오른쪽에 보여주고, 만약 공대공 모드에서 미사일이 선택된 경우에는 공격 기호도 보여준다.
9.2.4. 펄스 도플러 모드
9.2.4.1 PD 탐색 모드
[280쪽]
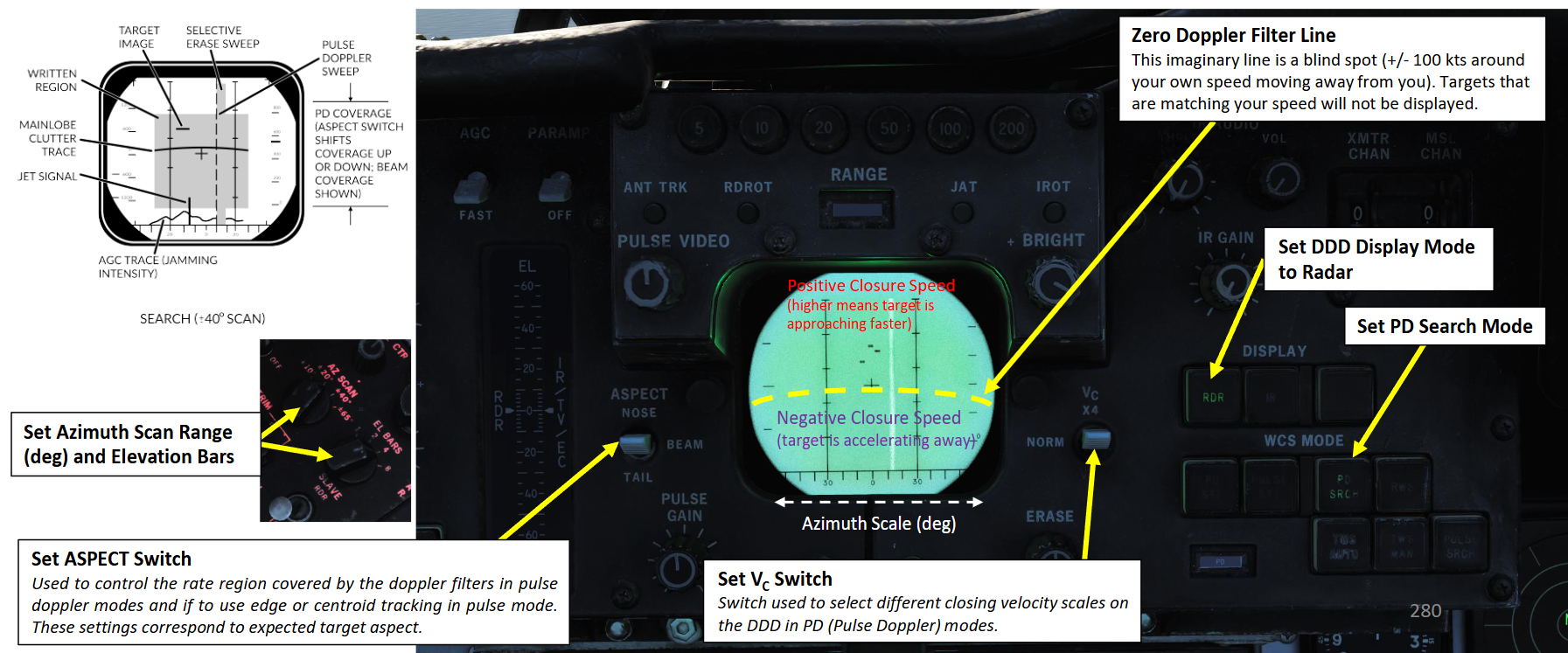
펄스 도플러 탐색 모드는 조기 경보 모드의 일종으로 주로 사용된다. 이것은 가장 넓은 탐지 범위를 갖지만 RIO에게 거리를 보여주지 않고 오직 접근 속도만 보여주는 탐색 모드이다. 이러한 이유로 TID가 추적 정보를 표시할 수 없다. 눈금은 오직 접촉의 방위각 (Azimuth)와 접근 속도만을 보여준다.
DDD에서 보여지는 속도 영역 (어느 속도 영역을 표시할지)은 DDD 제어반에 있는 Vc 스위치로 설정할 수 있다. X-4는 비율을 800 노트에 개방 4,000 노트에 닫도록 설정하고, NORM 은 200 노트에서 개방, 1,000 노트에 닫도록 설정한다. VID는 비율을 50 노트에서 개방, 250 노트에서 닫도록 설정한다. 도플러 필터의 운용 거리는 동일한 제어반의 ASPECT 스위치로도 설정할 수 있는데 NOSE는 600 노트에서 개방, 1,800 노트에서 닫으며, BEAM은 1,200 노트에서 열고 닫을 수 있도록 설정한다. TAIL은 1,800 노트에서 열고, 600 노트에서 닫는다. 이는 RIO가 도플러 필터를, 알고 있는 표적의 접근 속도에 최적화 시킬 수 있게 하며 DDD에만 영향을 미치는 Vc 스위치와 다르게 모든 레이더 처리 과정에 영향을 끼친다.
ASPECT 설정 스위치
펄스 도플러 모드에서는 도플러 필터로 덮인 속도 영역을 조절하기 위해서, 펄스 모드에서는 Edge 추적이나 중심 추적을 사용 여부를 결정하기 위해서 사용된다. 이 설정은 예상되는 표적의 각도 (Aspect)와 일치한다.
Vc 설정 스위치
펄스 도플러 모드 중 DDD에서 다른 접근 속도 범위를 선택하기 위해 사용하는 스위치.
PD 탐색 모드 설정
DDD 화면 모드를 레이더로 설정
0 도플러 필터 선 (Zero Doppler Filter Line)
이곳은 사각지대인 가상의 선이다. (현재 탑승 중인 항공기로부터 ± 100 노트로 멀어지고 있음) 자신의 속도와 일치하는 표적은 보여지지 않을 것이다.
양수의 접근 속도 (더 높을 것일수록 표적이 더 빠르게 접근하고 있음을 의미한다.)
음수의 접근 속도 (표적과의 거리가 계속 멀어지고 있다.)
방위각 탐색 거리 (도 단위) 및 상하각 바 설정
HCU 지동륜으로 안테나 상하각을 조정한다.
[281쪽]
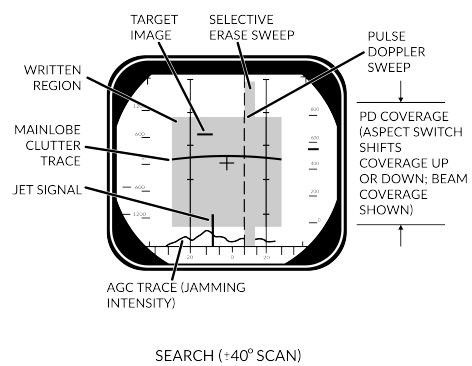
표적상
입력되는 영역
주엽 전파 잡음 흔적
JET 신호
AGC 흔적 (재밍 강도)
PD 범위 (ASPECT 스위치는 범위를 위 아래로 이동시킨다; BEAM 범위 표시됨)
펄스 도플러 훑음
선택된 지움 훑음
탐색 (±40º 탐색)
펄스 도플러 탐색 모드에서 DDD는 방위각 (Azimuth) 대 속도 (접근 속도) 축으로 반사 신호를 표시하는데 RIO는 DDD를 읽는 것만으로 표적의 접근 속도와 방위각을 알아차릴 수 있다. 화면은 상대 접근율 (Relative closure rate)와 달리 지상 대비 접근율 (현재 항공기가 움직이지 않는 것으로)을 보여준다. DDD의 아랫쪽 가장자리에는 AGC-흔적이 있는데 이는 레이더 반사 강도를 나타내며, 이것으로 RIO가 전파 방해(Jamming)를 시도하는 신호 강도를 바탕으로 표적을 식별할 수 있다. 전파 방해 표적이 설정한 재밍 임계점 (DDD의 JAM/JET 돌림 손잡이로 설정.)을 초과하는 경우 TID에 재밍 섬광등으로 보여진다.
레이더가 도플러 필터를 운용하는 방법 때문에 두 개의 불감 거리 (Two Blind Ranges)가 생긴다.
하나는 주엽 잡음 (Mainlobe Clutter, MLC) 영역으로 0의 대지 속도(Groundspeed)를 반사하는 대부분의 지상 반사가 포함되며, 현재 항공기 대지 속도 (Groundspeed)를 중심으로 (133 노트 더 느리거나 더 빠른) 266 노트의 영역이다. 이러한 이유로, 지표면이 필터에서 걸러지는 것처럼, 동일한 상대 대지 속도 (Relative Groundspeed)를 가진 표적은 레이더를 회피할 수 있게 된다.
레이더의 두 번째 필터, 두 번째 맹점은 zero doppler filter (0 도플러 필터) 이다. 이 불감 구역은 음수인 (negative) 현재 대지 속도의 접근율 중심에 있다 이는 현재 항공기와 동일한 속도로, 현재 항공기로부터 멀어지는 표적을 의미한다. 이 불감 구역은 도플러 이동 없이는 표적을 탐지할 수 없는 도플러 레이더 모드 때문에 생기는 물리적인 한계이다. 불감 구역이 200 노트 범위라는 점은 현재 대기 속도의 ±100 노트 범위 안에서의 속도로 움직이는 표적을 쫓는 것은 레이더에서 보여지지 않을 거라는 뜻이다. 그러므로 도망치는 표적을 쫓을 때에는 펄스 모드가 대신 사용할 필요할 있을 수 있다.
표적과 자신의 대기 속도는 각도(Aspect)에 따라서 다를 수 있다. 45º에 있는 표적의 상대 대기 속도는 0º에 있는 표적보다 적을 것이다. 자신의 속도 벡터가 조금씩 표적에서 멀어지는 방향으로 향하고 있기 때문이다. 이것이 DDD에서 주엽 잡음 흔적 (Trace)가 곡선을 그리는 이유인데, 지면 반사의 관측된 속도가 방위각 (Azimuth)에 따라 다르기 때문이다.
[282쪽]
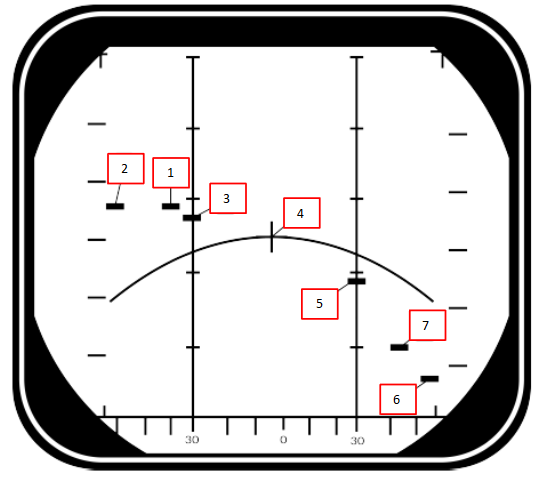
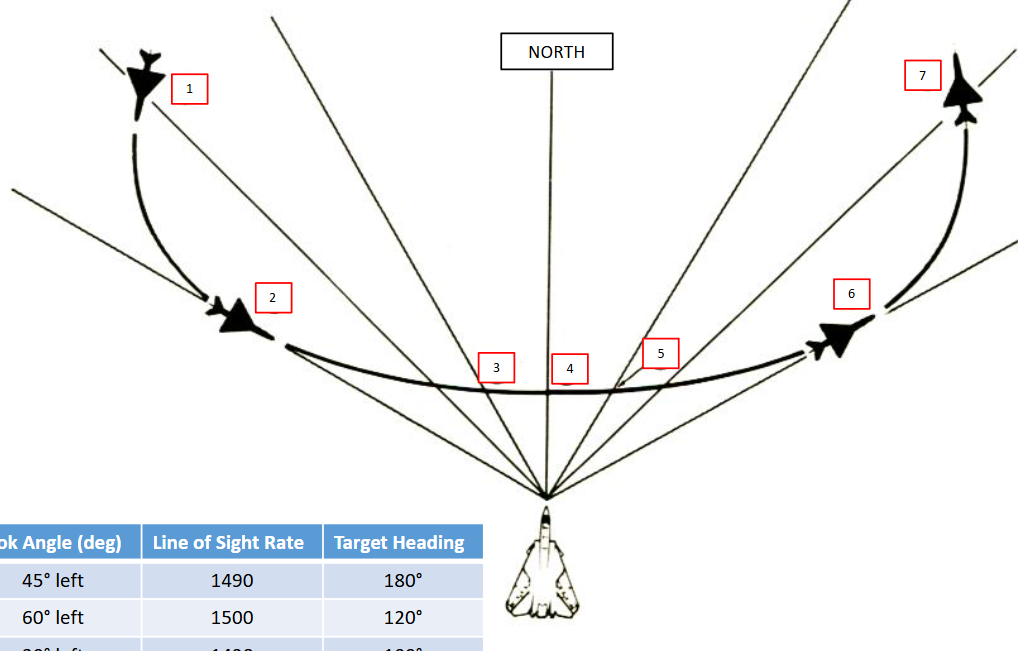
| 표적 지상 속도 900 노트, 자신의 대기 속도 1,200 노트. 자세한 것은 표를 참고. Line of Sight Rate는 표적과 자신의 항공기의 상대 속도 (Relative rate)의 합이다. |
| 보는 각도 (도 단위) | Line of Sight Rate | 표적 기수 방위각 | |
| 1 | 45º 왼쪽 | 1490 | 180º |
| 2 | 60º 왼쪽 | 1500 | 120º |
| 3 | 30º 왼쪽 | 1428 | 100º |
| 4 | 0º | 1200 | 90º |
| 5 | 30º 오른쪽 | 672 | 80º |
| 6 | 60º 오른쪽 | -300 | 60º |
| 7 | 45º 오른쪽 | 210 | 0º |
9.2.4.2 RWS (Range While Search, 탐색 중 거리 측정) 모드
[282쪽]
탐색 중 거리 측정 (RWS)에는 레이더로 추적 중인 표적의 거리와 접근율을 측정할 수 있는 ' 주파수 측정 거리 측정 모드(Frequency Measuring Ranging Mode)'가 추가됐다. (FM Ranging) 하지만 이 추가 과정은 레이더의 효과적인 거리 측정이 다소 덜하다는 것을 의미한다. 이 모드는 TWS (탐색 중 추적, Track While Scan)으로 전환하기 전에 좋은 공중 그림을 얻기 위해 사용한다.
● DDD상의 화면은 펄스 도플러 탐색 때와 똑같다.
● TID도 이 모드에서 추적들을 보여주는데, 항적들이 탐색될 때 잠깐 추적 정보로서 표적들을 표시하고 그들의 위치와 고도를 표시한다.
● TID에서 동시에 보여지는 추적 정보들의 수는 최대 48개이다.
● TID에서 표적을 락(Lock) 할 수 없고, 오직 DDD에서만 가능하다. (펄스 도플러 STT 락을 참고.)
방위각 탐색 범위 (도 단위) 및 상하각 바 설정
HCU 지동륜으로 안테나 상하각 조절
접촉
양수의 접근 속도 (더 높을 것일수록 표적이 더 빠르게 접근하고 있음을 의미한다.)
음수의 접근 속도 (표적과의 거리가 계속 멀어지고 있다.)
방위각 범위 (도 단위)
DDD 화면 모드를 레이더로 설정
RWS 모드 설정
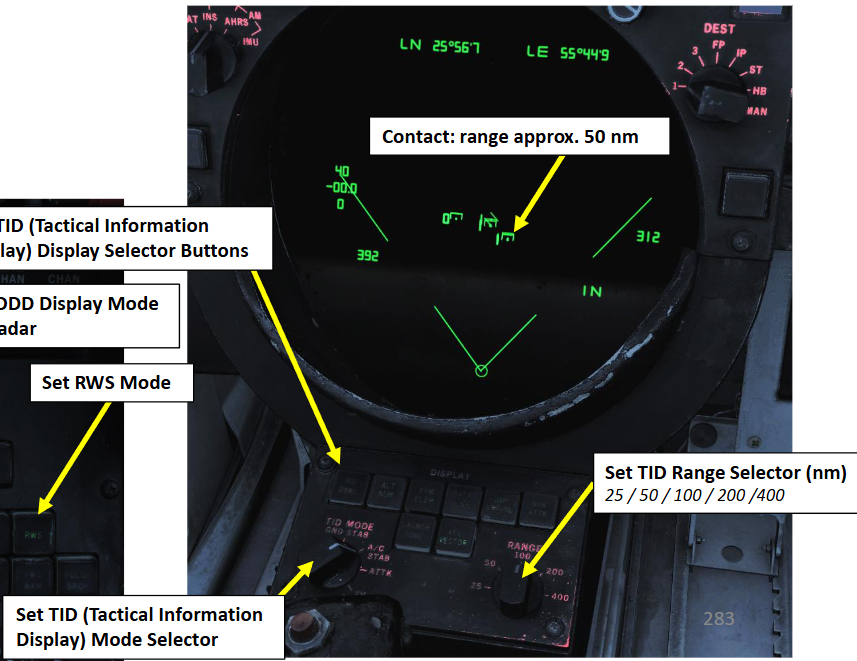
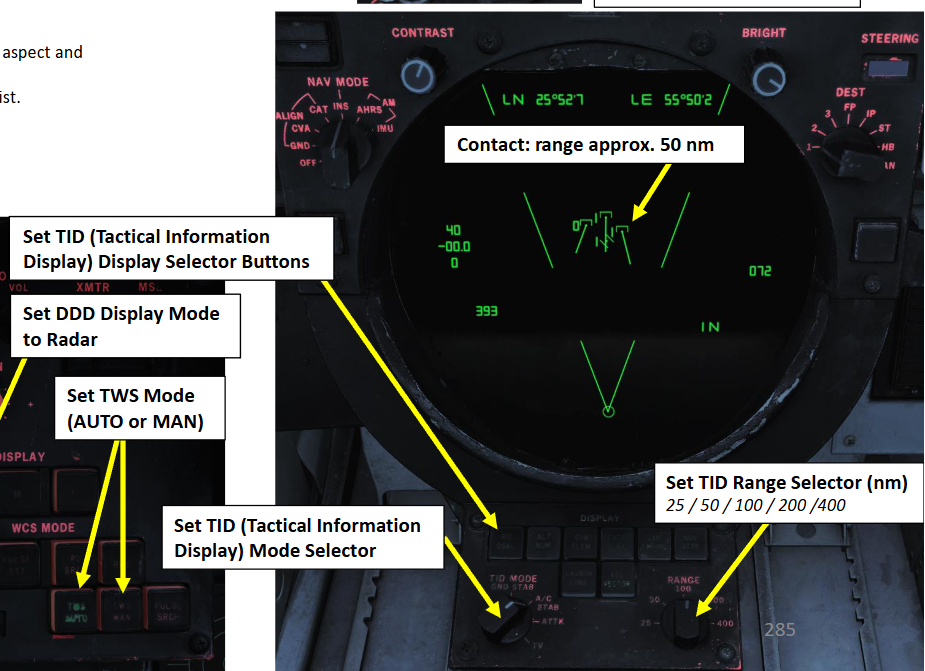
접촉: 거리 대략 50 nm
TID (전술 정보 화면) 화면 선택 장치 단추
TID (전술 정보 화면) 모드 선택 장치
TID 거리 선택 장치 (nm 단위)
25 / 50 / 100 / 200 / 400
9.2.4.3 TWS (Track While Scan, 탐색 중 추적) 모드
9.2.4.3.1 TWS 요약 - TWS 기초
[284쪽]
탐색 중 추적 (TWS) 모드는 RWS와 동일한 FM 거리 측정을 사용한다. 이로 인해 펄스 도플러 탐색과 비교할 때 RWS와 마찬가지로 동일한 사거리의 감소를 보이며 DDD 화면 또한 똑같다. 주요 차이점은 컴퓨터가 추적 파일을 생성하고, 24개의 표적까지 동시에 추적하며 그 중에 18개만 언제든지 TID에 표시된다는 것이다.

[285쪽]
● DDD의 화면은 펄스 도플러 탐색일 때와 동일하다.
● TID도 이 모드에서 추적들을 보여주는데, 항적들이 탐색될 때 잠깐 추적 정보로서 표적들을 표시하고 그들의 위치와 고도를 표시한다.
● DDD 혹은 TID 상에서 표적을 레이더 락 할 수 있다.
● 20도 4바 탐색 혹은 40도 2바 탐색만 사용할 수 있다. (이 외에 다른 방위각/상하각 바의 조합이 선택되어 있다면 자동으로 설정됨.)
● F-14는 수동과 자동으로 두 개의 TWS 모드를 갖고 있다.
● TWS MAN은 RIO에게 레이더 운용을 남겨둔다.
● TWS AUTO는 접촉과의 거리, 각도 (Aspect) 그리고 접근율에 따라 자동으로 우선 순위를 매긴다.
● 제스터에게 TWS 목록에서의 첫 번째 혹은 특정한 접촉을 선택하도록 지시할 수 있다.

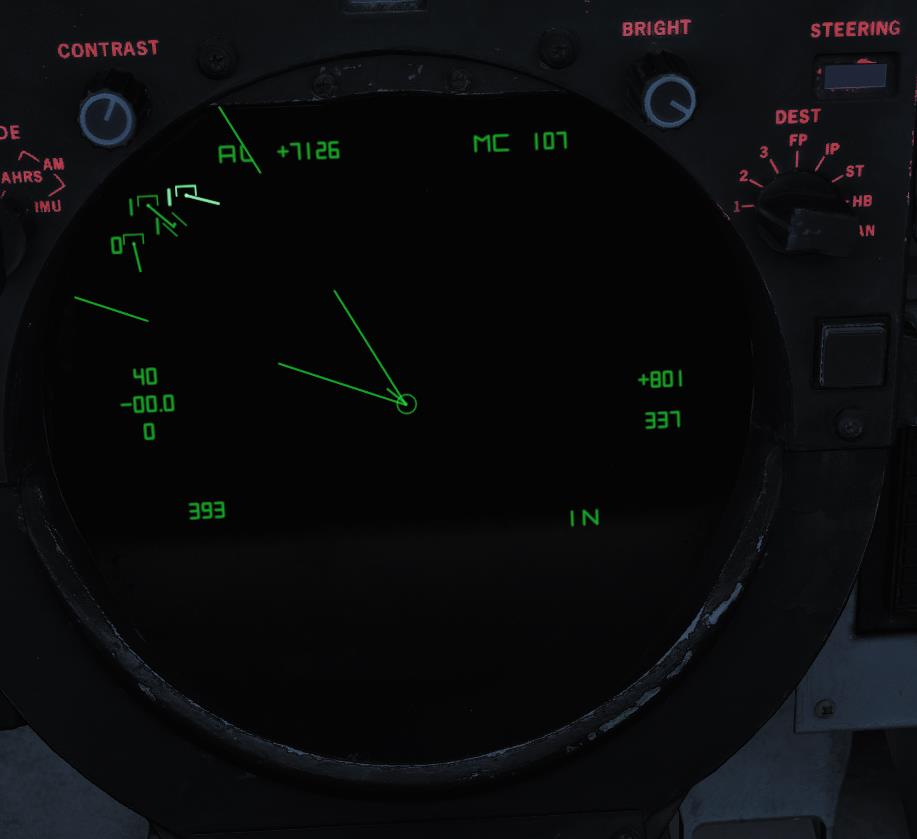
접촉
양수의 접근 속도 (더 높을 것일수록 표적이 더 빠르게 접근하고 있음을 의미한다.)
음수의 접근 속도 (표적과의 거리가 계속 멀어지고 있다.)
방위각 범위 (도 단위)
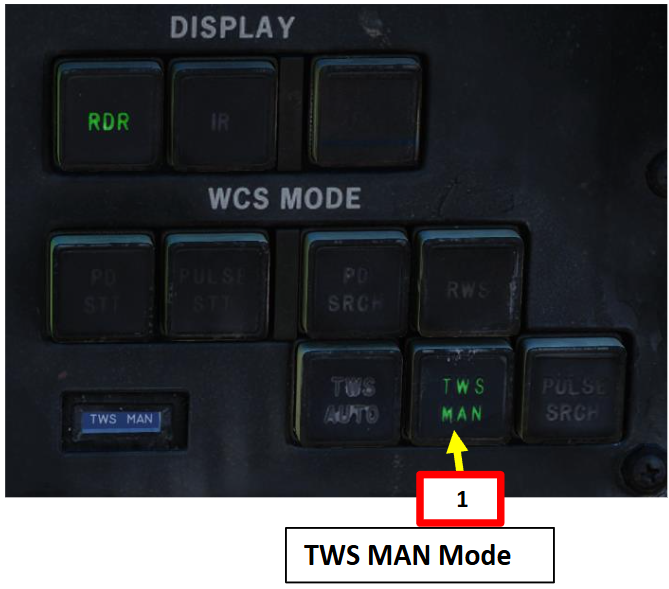
DDD 화면 모드를 레이더로 설정
TWS 모드 설정 (AUTO 혹은 MAN)
방위각 탐색 범위 (도 단위) 및 상하각 바 설정
HCU 지동륜으로 안테나 상하각 조절
접촉: 거리 대략 50 nm
TID (전술 정보 화면) 화면 선택 장치 단추
TID (전술 정보 화면) 모드 선택 장치
TID 거리 선택 장치 (nm 단위)
25 / 50 / 100 / 200 / 400
[286쪽]
TWS 자동과 수동 모드의 차이점은 TWS 자동일 때 표적의 항적이 나타나자마자 사용 중인 탐색 크기, 탐색 패턴 방위각 (Azimuth)및 상하각 (Elevation)의 제어를 컴퓨터가 가져간다는 점이다.
TWS 모드는 또한 다중 표적에게 AIM-54를 유도할 수 있는 유일한 모드이다. (6개까지) 교전할 수 있는 표적을 탐지하자마자 컴퓨터는 미사일 우선 순위 숫자를, 최적의 미사일 발사 절차에 따라서 표적들에게 부여하기 시작한다.
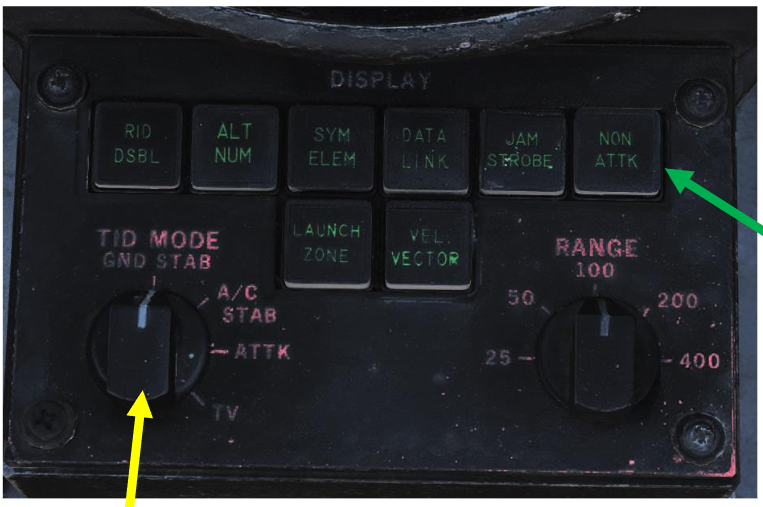
| TID (전술 정보 화면) 화면 선택 장치 단추 = 초록색 화살표 윗열: ● RID DISABLE: 미구현. ● ALT NUM: 고도 숫자. 항적 기호 왼쪽에 항적의 고도 표시를 활성화한다. 10,000 feet 단위를 나타내는 하나의 숫자가 보여진다. (1 = 10,000 feet) ● SYM ELEM: 기호 요소. 항적과 중간 경로 (Waypoints)의 모든 추가 기호 표시를 활성화한다. ● DATA LINK: 데이터 링크 항적의 표시를 활성화한다. ● JAM STROBE: TID에 전파 방해 섬광등 표시를 활성화한다. ● NON-ATTK: 비공격. 교전 가능성이 없는 표적의 표시를 활성·비활성한다. 아군기가 그 예이다. 아랫열: ● LAUNCH ZONE: 선택한 미사일 유형에 따르는 무장 발사 구간의 표시를 활성화한다. 이는 연관된 표적의 속도 벡터 (Velocity Vector)를 대체한다. 이 기능은 WCS가 표적이 최대 발사 거리로 들어오기 60초 전에 자동으로 활성화시킨다. ● VEL VECTOR: 속도 벡터 (Velocity Vector). 항적에 속도 벡터 표시를 활성화한다. |

| TID (전술 정보 화면) 모드 선택 장치 = 노란색 화살표 ● GND STAB: 지상 안정. 화면에서 자신의 항공기가 움직이는 동안 화면은 고정되어 있도록 지상에 화면을 안정화시킨다. 진북이 화면의 위쪽으로 사용된다. ● A/C STAB: 항공기 안정. 화면에 가만히 있는 자신의 항공기를 따라서 화면이 움직이도록 자신의 항공기에 화면을 안정화시킨다. ● ATTAK: 공격 기능으로 A/C STAB와 같은 방식이지만 공격 조향 기호를 겹쳐서 보여준다. ● TV: TID에 화면을 TCS로 선택한다. TID와 HSD에 일반 전술적 표시를 비활성화한다. LANTIRN이 장착하고 LANTIRN VIDEO 스위치가 FLIR로 설정되어 있다면 LANTIRN의 화면이 TID에 나타난다. |
9.2.4.3.2 TWS 수동 부가 모드
[287쪽]
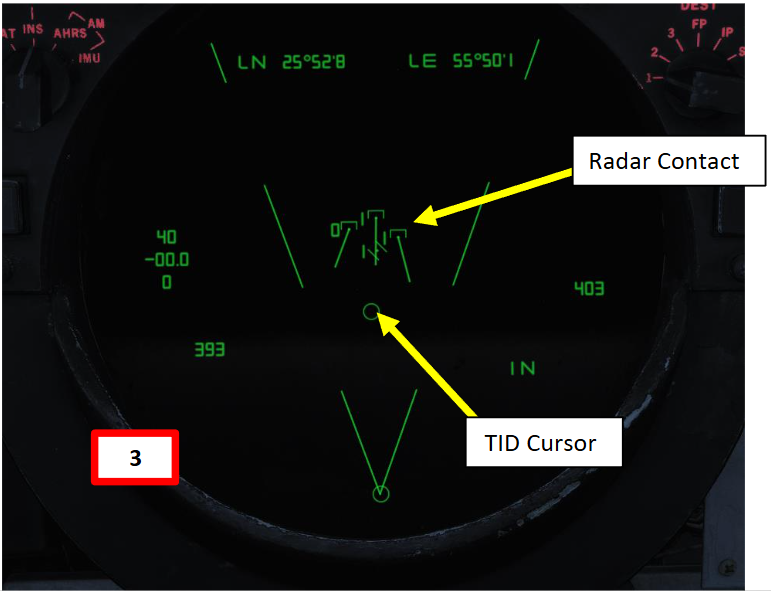
만약 적절한 레이더 락을 하지 않고 표적으로부터 더 많은 정보를 모으기를 원한다면, TID 커서만으로 표적을 걸 수 있다. (Hook) 이것은 간단하게 거리 (RA), 방위각 (BR), 고도 (AL), 자침로 (Magnetic Course, MC) 정보를 주는 'soft lock'으로 생각할 수 있다.
1. TWS MAN 모드를 선택.
2. "TID CURSOR" TID 모드 선택.
3. 첫 번째 HCU 방아쇠를 누르고 유지한다. (Half-Action) TID 커서가 TID에 나타날 것이다.
4. HCU 조종간을 사용하여 TID 커서를 원하는 표적 위로 옮긴다.
5. 커서를 원하는 접촉 위로 보낸 다음, 두 번째 HCU 방아쇠를 눌러서 (Full-Action) 표적을 선택한다.
[288쪽]
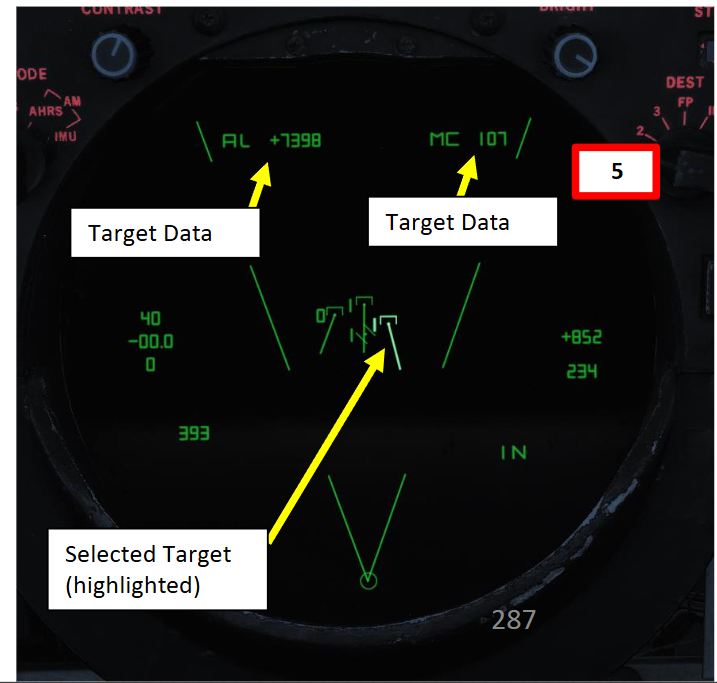
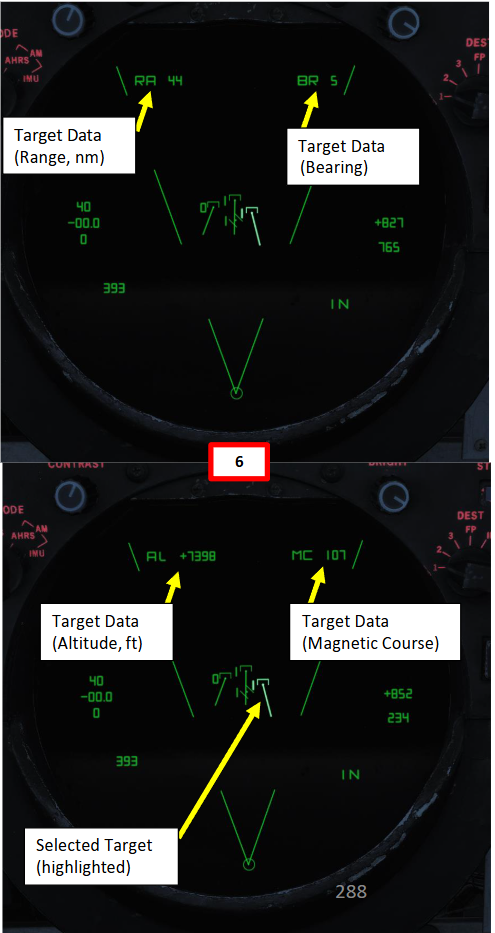
6. 표적이 선택된다면 TID에 거리 (RA), 방위각 (BR), 고도 (AL) 그리고 자침로 (MC) 정보가 표시될 것이다. 이것은 레이더 락이 아니므로 이 기능으로는 무장을 사용할 수 없다는 것을 명심할 것.
7. 레이더로 표적을 락하고 싶을 때는 (Hard Lock), PD STT나 펄스 STT 단추를 누른다.
8. 표적을 지정 해제 하기 위해서는 첫 번째 HCU 방아쇠 (Half-Action)을 누른다.
9.2.4.3.3 TWS 자동 부가 모드
[289쪽]
도입부
TWS AUTO 모드는 TWS MAN과 거의 흡사하게 작동한다. 차이점은 탐색 원뿔 방위각과 상하각 (Scan cone azimuth and elevation angle)처럼 다수의 레이더 한도가 다르다는 점이다. 조향 신호 또한 조종사를 최고의 발사 해답 (Firing Solution)으로 안내하는 것을 돕기 위해서 계산된다. 레이더 표적 선택 (Soft Lock)과 STT Lock (Hard Lock)은 TWS MAN 에서와 동일한 방법으로 할 수 있다.
간단히 말해서, TWS 자동은 최적의 탐색 크기 (Scan Volume)도 제어하면서 가장 유용한 방위각과 상하각으로 지향하도록 TWS 패턴을 유지하려고 한다.
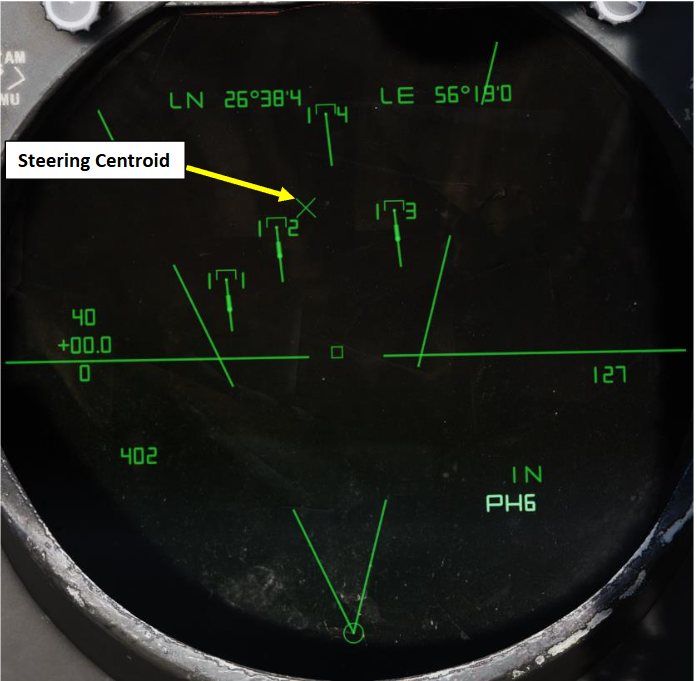
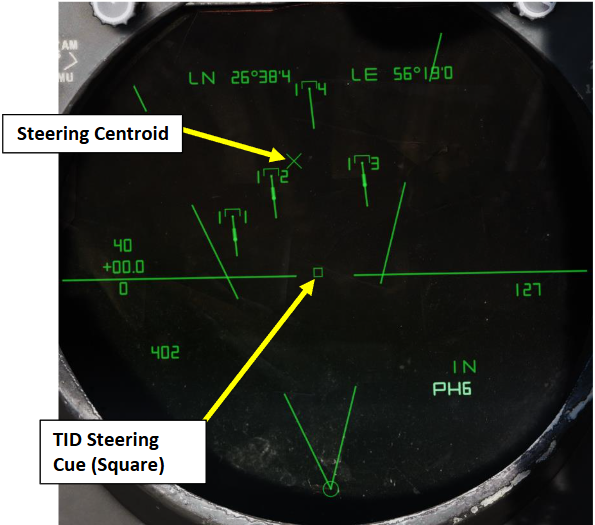
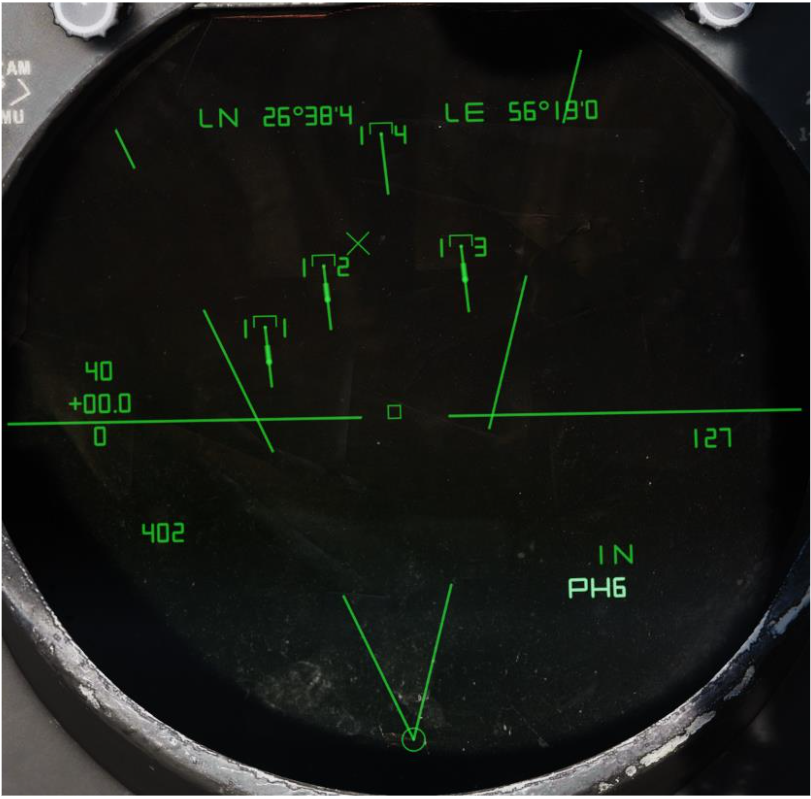
방위각과 상하각은 탐색 크기 (스캔 볼륨)에서 표적의 계산된 가중 중심 Weighted Centroid (기하학적 중심)에 의해 결정된다. 표적 가중은 이 장에서 나중에 알아보게 될 다수의 한도 기능이다. (Target weights are a function of a number of parameters we will explore later in this section) 이는 조향 중심 기호 (Steering Centroid Symbol)로 RIO의 전술 정보 화면에서 볼 수 있다. 이것을 "레이더가 보고 있는 곳이 어디인지를 보여주는 X 기호"로 생각할 것.
[290쪽]
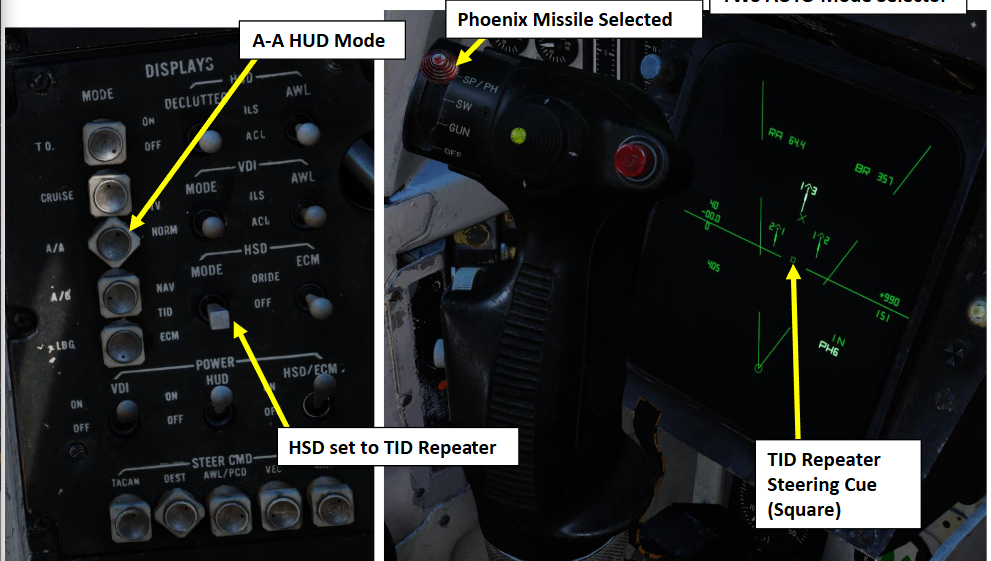
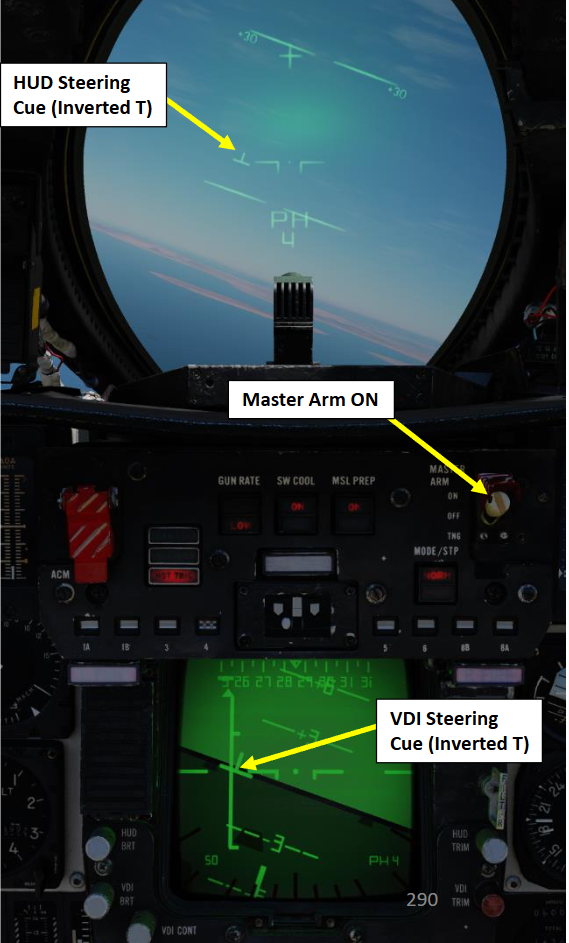
조종사 조향 신호
TWS Auto는 조종사를 위해 조향 신호를 계산합니다. 계산된 조향 중심 (Steering Centorid)에 따라 수평 한정으로 조종사를 향하게 합니다.
조향 신호는 다음과 같은 경우에만 볼 수 있습니다.
● A-A (공대공) HUD 모드를 선택.
● Master Arm ON (위로 올림)
● 피닉스 (AIM-54) 혹은 스패로우 (AIM-7) 미사일이 선택됨.
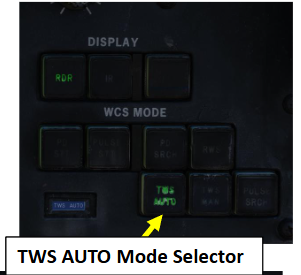
● RIO 자리에서 TWS-Auto 를 선택.
[291쪽]
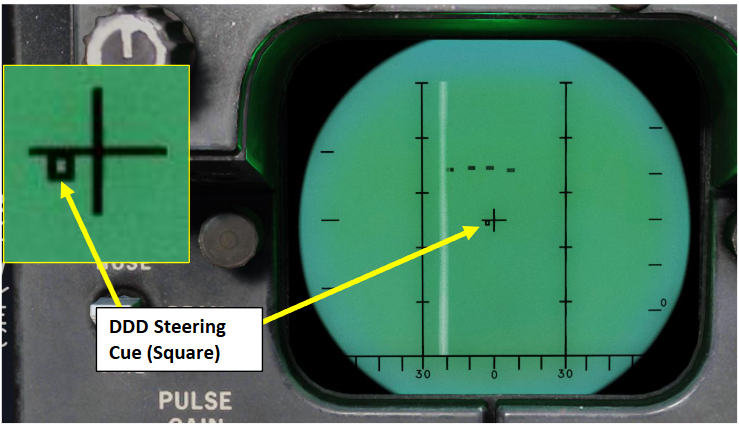
RIO 조향 신호 & 중심
TWS-Auto 는 DDD (세부 정보 화면) 및 TID (전술 정보 화면)에 RIO를 위한 조향 신호도 계산한다.
조향 중심점(Steering Centroid)과 가상 중심점(Illumination Centroid)으로 나눌 수 있는 두 개의 중심점이 TWS-Auto 최신화 절차의 일환으로 계산된다.
● 조향 중심점은 조향 신호 (HUD, VDI, TID, DDD)가 조종사를 최적의 표적 범위를 유지할 수 있게 돕게 하며, 작은 X 표시를 TID에 표시하여 조향 중심점 위치를 나타낸다. 이 중심점을 계산할 때는 레이더 짐벌 한계 (최대 전개, 방위각과 상하각 모두 ±65º)를 고려한다.
● 가상 중심점은 (보이지 않음) 항공기로부터 계산된 가상 중심점까지로의 각도를 사용하여 탐색 범위 중심의 방위각과 상하각을 조절한다. 이 중심점을 계산할 때는 현재 탐색 크기 (Scan Volume) 한계 (즉, 2-바 ±40 혹은 4-바 ±20)를 고려한다.
조향 및 가상 중심점의 속도 (Velocities) (Change in position over time)도 계산된다. 모든 표적을 잃어버렸을 때는 계산된 조향 신호가 짧은 시간 동안 사용된다. (표적의 예상되는 위치에서 표적을 재획득하기 위해 시도하는 것.)
[292쪽]
표적 중요성 (Target Weights)
조향 중심점은 탐색 크기에서 중요하게 여겨지는 표적의 중심점으로 결정된다. 몇몇 표적은 다른 것들보다 더 조향 중심점의 원인이 된다. 이는 그들 각각의 "중요성 (Weight)"에 따른다. 각각 표적의 위치는 모든 표적의 총 중요도로 나눠지는 각각의 중요성 요소에 따라 증가된다. 그리고 이렇게 중요성이 더해진 위치는 중심점을 부여하기 위해 모두 모인다. 오직 센서 표적만 고려되며 (즉, 자신의 레이더), 데이터링크 표적은 그렇지 않다.
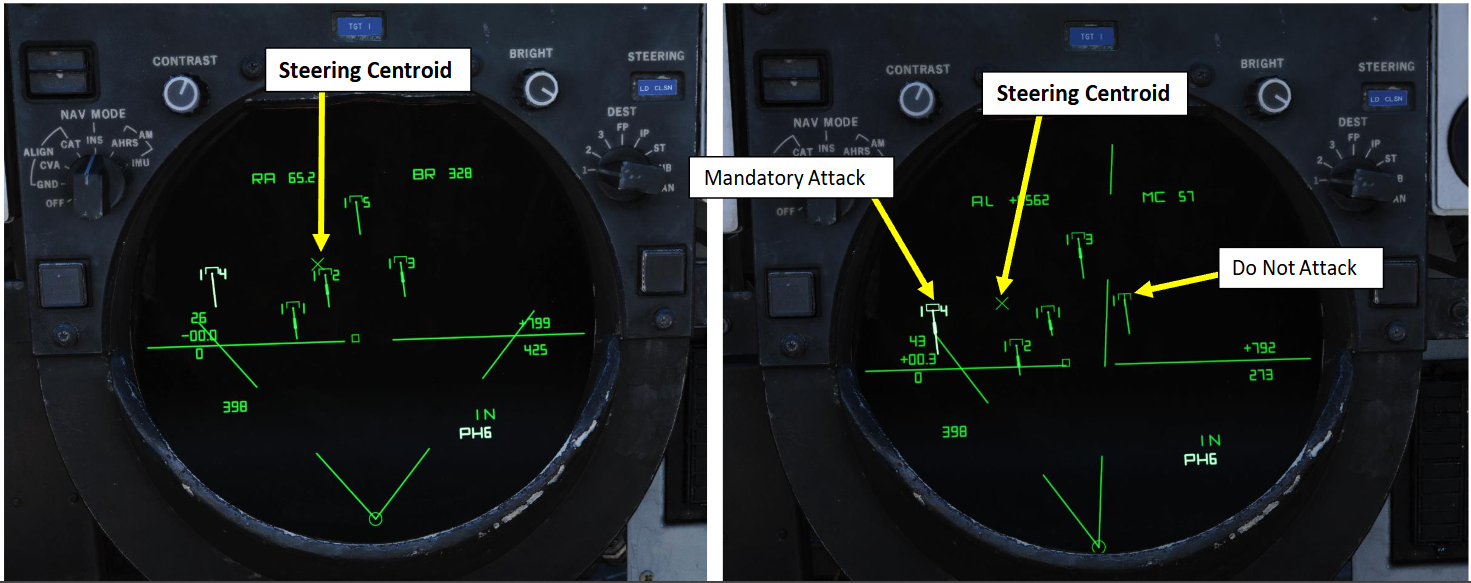
표적의 중요성은 조향 중심점 포좌(emplacement)에 영향을 주고, 많은 매개 변수의 기능을 한다.
가장 중요한 것은 다음과 같이 되는 것이다.
● 발사 구역의 존재 (RIO가 아군으로 표시한 표적은 발사 구역에 나타나지 않는다.)
● 이미 적에게로 날아가는 미사일
● TGT DATA (표적 정보) 메뉴의 CAP (컴퓨터 주소반) 단추로 설정할 수 있는 DO NOT ATTK (공격 금지), MAND ATTK (의무 공격 대상)과 같은 표적을 RIO가 선택한다.
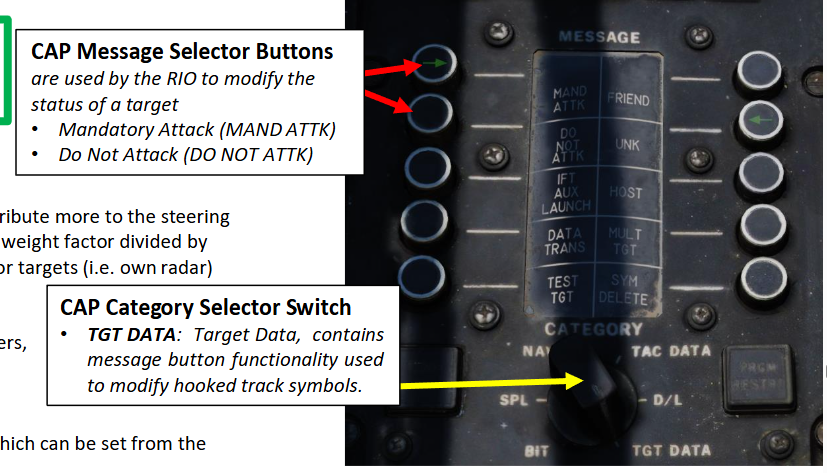
CAP 문자 선택 장치 단추
RIO가 표적의 중요도를 수정하기 위해 사용한다.
● 의무적인 공격 (MAND ATTK)
● 공격 금지 (DO NOT ATTK)
CAP 범주 선택 장치 단추
● TGT DATA: 표적 정보. 획득한 항적 기호를 수정하기 위해 사용하는 문자 단추 기능을 포함하고 있다.
[293쪽]
운용
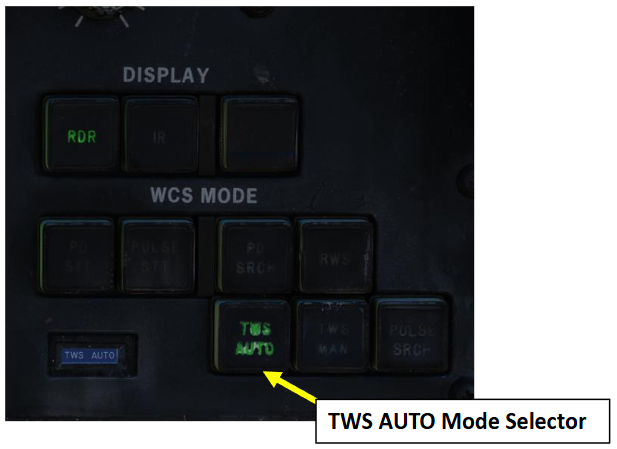
● TWS-Auto는 TWS AUTO 모드 선택 장치 단추를 누르는 것으로 활성화된다.
● TWS-Auto가 처음 활성화 될 때, RIO가 여전히 방위각, 상하각, 스캔 볼륨 패턴에 영향을 끼치고 제어할 수 있는 8초간의 시간이 있다.
● 이 시간 이후, TWS-Auto 컴퓨터가 인계 받는다.
● 스캔 볼륨 패턴 (2-bar 대 4-bar)는 매 4초마다, 조향 중심점과 가상 중심점은 매 초마다 여러 번 재평가받는다. 중요도 (Weights)는 2초의 스캔 프레임이 끝날 때마다 최신화된다.
● 스캔 볼륨 알고리즘은 모든 표적의 미래 위치를 고려한다. 또한 두 옵션 중 어느 것이 최대의 Illumintaiton 중요도 (weight) 총량을 제공할지 선택한다. 만약 동일하다면, 4-bar ±20º가 선택된다.
TWS 수동일 때 AIM-54 피닉스를 발사하는 것은 TWS-Auto를 자동 선택하는 결과로 이어진다는 것을 주목할 것. 어떤 AIM-54 미사일이든 비행 중으로 여겨지는 경우에는 (예상 착탄 시간을 넘어 16초까지) TWS 수동 모드로 진입할 수 없다. 미사일의 표적이 된 항적들은 Track Hold (TID fishbowl 왼쪽의 단추, 다음 페이지를 볼 것)가 선택된 것처럼 움직일 것이다. 다시 말해서, 이 항적들은 레이더 접촉을 잃은 경우 2분까지 계속해서 추론될 것이다.
9.2.4.3.4 TWS 모드 추가 기능
[294쪽]
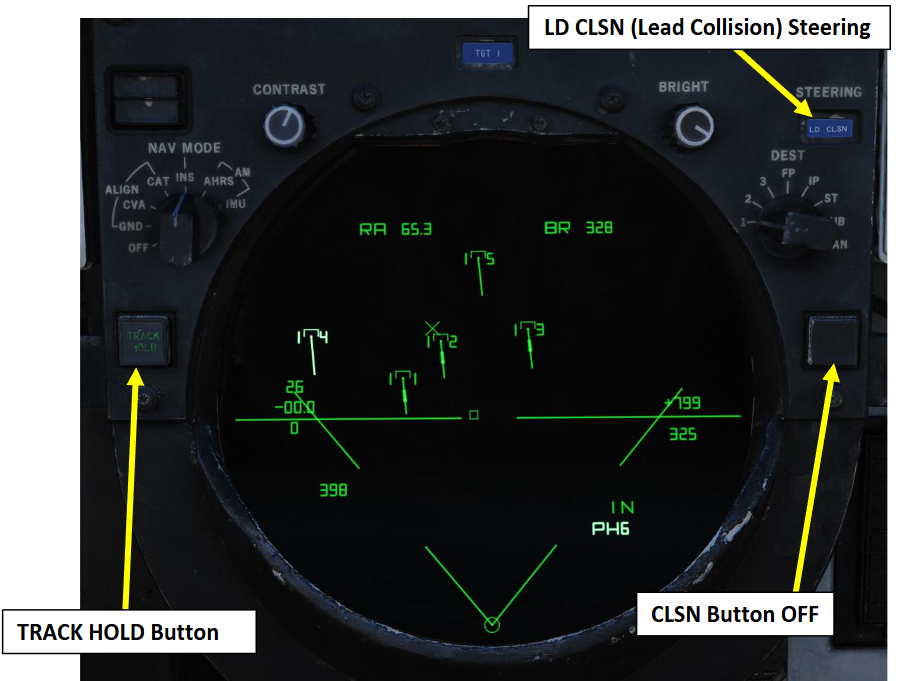
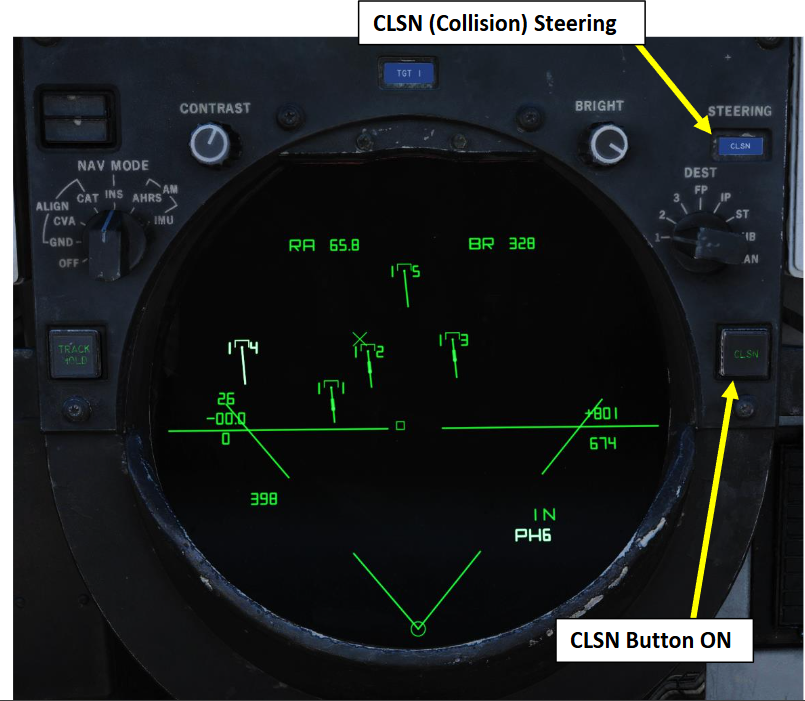
추적 유지 & 충돌 조향 (Track Hold & Collision Steering)
● TRACK HOLD 단추는 TWS 추적 유지 기능을 활성화한다. 일반적으로, TWS 모드인 경우 TID에서 보여지는 표적은 마지막 관찰 이후 14초 동안 유지된다. 이 기능이 활성화됐을 때, 추적 유지 기능은 모든 항적에 대해 이 시간을 2분까지 연장한다. 만약 잠깐이라도 시야에서 사라질 수 있는 레이더 접촉을 계속 지켜보고 싶다면 이 기능이 유용할 것이다.
● CLSN 단추는 현재 추적 중인 표적으로 충돌 조향을 활성화한다. (TWS인 경우 조향 중심점으로) 조종사가 ACM (Air Combat Manoeuver)를 선택한 경우만을 제외하고, 이 선택은 충돌 조향으로써 조종사에게 보여지는 현재 조향 정보를 무시한다. LD CLSN (Lead Collision Steering, 선도 충돌 조향)은 방위각 조향 정보만을 제공하지만, CLSN (Collision Steering, 충돌 조향)은 방위각과 상하각 조향 정보를 모두 보여준다.

9.2.4.4 펄스 도플러 STT (단일 표적 추적)
[295쪽]
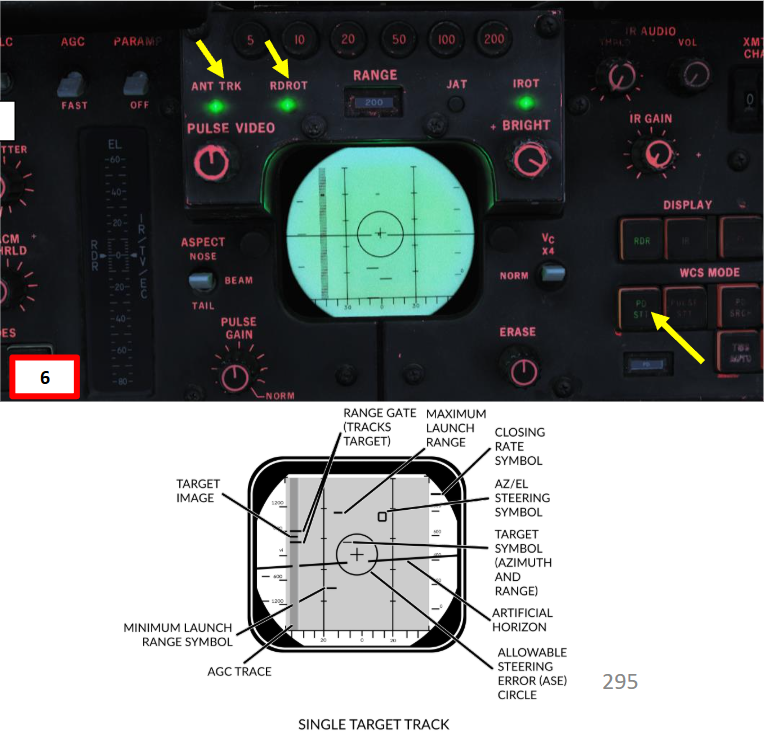
펄스 도플러 STT (단일 표적 추적)은 펄스 STT 모드와 매우 비슷해보이며, 비슷하게 작동한다. 하지만 이것은 펄스 STT와 비교할 때, 다른 펄스 모드와 펄스 도플러 모드를 비교할 때와 동일한 이점과 장점을 갖는다. 이는 지상에 근접한 표적을 추적하는 데에 훨씬 좋지만 Notching 에 취약해진다는 것이다.
펄스 도플러 모드에서 펄스 도플러 STT로 레이더 Lock을 얻는 방법
1. 펄스 도플러 모드 (PD 탐색, TWS, RWS) 상태인지 확인한다.
2. RDR HCU 모드를 선택한다.
3. 첫 번째 HCU 방아쇠 (Half-Action)을 누르고 유지하면 레이더 커서가 DDD에 나타날 것이다.
4. HCU 조종간을 이용하여 커서를 원하는 표적 위로 움직인다.
5. 원하는 접촉 위에 커서를 올린 후에 HCU 두 번째 방아쇠 (Full-Action)을 눌러서 표적을 Lock 한다.
6. 접촉이 Lock 된 후, DDD와 TID가 자동으로 펄스 도플러 (PD) STT 모드로 들어갈 것이다. 거리 (Ranging, RA), 방위각 (Bearing, BR), 고도 (Altitude, AL) 그리고 자침로 (Magnetic Course, MC) 정보가 TID에 뜰 것이다.
7. 표적을 고정 해제 (Unlock)하기 위해서는 HCU 첫 번째 방아쇠 (Half-Action)을 누른다.
● 성공적인 추적은 ANT TRK와 RDROT 표시등이 DDD에 보여지는 것으로 알 수 있다. 이는 안테나가 표적을 추적 중이며 표적이 거리 게이트 (Range Gates) 안에 들어와있음을 의미한다.
● 화면은 표적 오른쪽에 표적으로부터의 레이더 반사, 추적 게이트 (거리 혹은 거리 속도 게이트 중 하나), 접근 속도 표시를 보여주며 만약 공대공 모드이고 미사일이 선택되어있다면 공격 기호도 보여준다. 표적의 레이더 반사와 안테나 방위각 표시는 화면의 왼쪽으로 이동하고 생성된 종합 표적 표시기 (A generated Synthetic Target Marker)가 올바른 방위각에 표시된다. 그래서 이것은 오직 접근율만 보여주는 다른 펄스 도플러 모드와 다르게 종합 표적에 표적 거리가 표시될 수 있는 것이다.
단일 표적 추적
표적상
거리 게이트 (표적을 추적함.)
최소 발사 거리 기호
AGC 흔적
ASE 원형 (의역: 조준점)
가상 수평선
표적 기호 (방위각 및 거리)
AZ/EL 조향 기호
접근 속도 기호
최대 발사 거리
9.2.5. ACM 모드
9.2.5.1. PLM (Pilot Lockon, 조종사 락온) 모드
[296쪽]
PLM (Pilot Lockon Mode)는 가장 높은 우선 순위를 갖는 ACM 모드로, 조종사가 오른쪽 쓰로틀 전면의 PLM 단추를 누르는 것으로 활성화 되며 다른 어떠한 레이더 모드보다도 우선시 된다. 단추를 누르면 안테나가 무장 정보 선으로 (Armament Datum Line, ADL) 향하게 만들고 5NM 내에 보여지는 첫 번째 표적에 고정(Lock)한다.
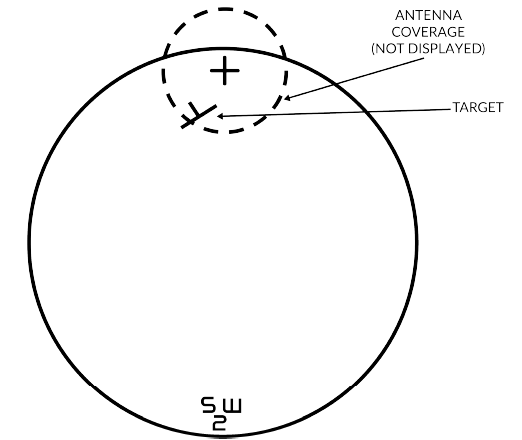
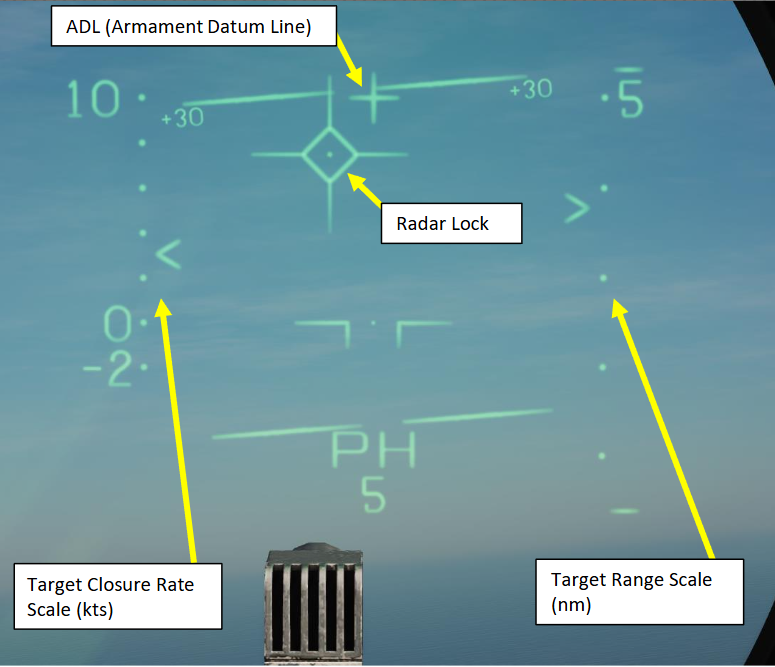

PLM을 사용하는 절차는 조종사가 HUD의 ADL 표지를 표적 위에 올라가도록 조종한 후 락온이 될 때까지 PLM 단추르르 누르고 유지하는 것이다. PLM은 표적이 탐지되고, 펄스 STT로의 이행이 발생할 때까지 혹은 PLM 단추를 놓아서 레이더가 펄스 탐색으로 대신 이행되도록 할 때까지 계속 작동한다.
9.2.5.2. VSL (Vertical Scan Lockon, 수직 탐색 락온) 모드
[297쪽]
VSL (수직 탐색 락온) 모드는 현재 항공기의 기수 -15º부터 +55º까지의 표적을 획득하기 위해 사용되며, 조종사 혹은 RIO가 활성화할 수 있다. RIO는 RIO 조종석의 센서 제어반에서 VSL 스위치로 사용할 수 있다.
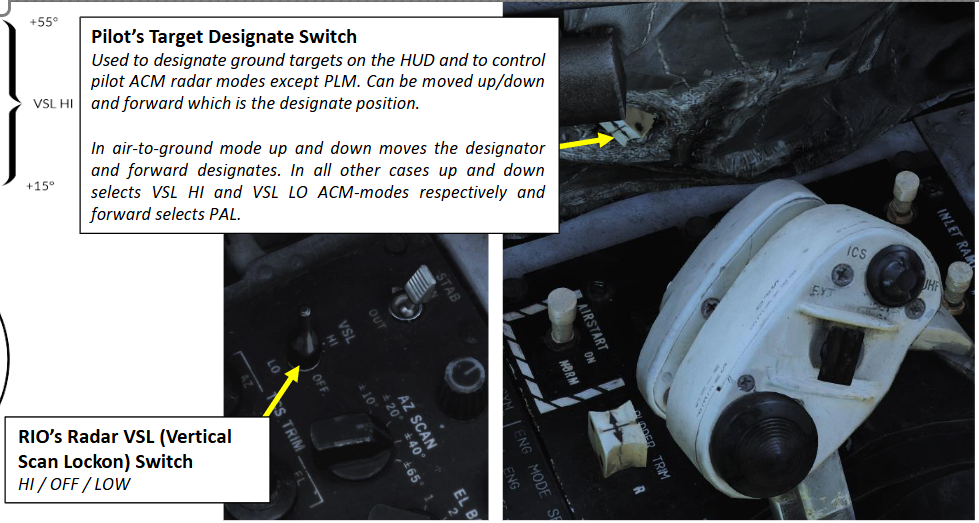
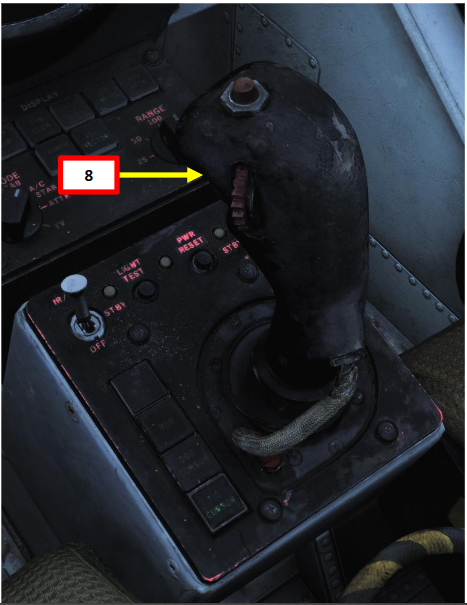
| 조종사의 표적 지정 스위치 HUD상의 지상 표적을 지정하기 위해, PLM을 제외하고 조종사 ACM 레이더 모드를 제어하기 위해서 사용한다. 위/아래 그리고 전방으로 움직일 수 있으며, 전방으로의 움직임이 위치 지정이다. 공대지 모드에서 위 아래 움직임은 지시기를 움직이고, 전방은 지정하게 만든다. 이밖에 다른 모든 경우에서 위 아래는 VSL HI 및 VSL LO ACM-모드를 각각 선택하고, 전방은 PAL을 선택한다. |
| RIO의 레이더 VSL (수직 탐색 락온) 스위치 HI / OFF / LOW |
스위치를 VSL HI (높음) 혹은 VSL LO (낮음) 중 하나에 스위치를 놓아두는 것으로 두 가지의 부가 모드를 사용할 수 있으며 스위치를 가운데에 놓아서 원래대로 되돌릴 수 있다. 조종사는 A/G (공대지) 모드가 아닐 때 표적 지정 스위치에서 위 혹은 아래를 선택하는 것으로 VSL HI 나 LO를 활성화할 수 있다.
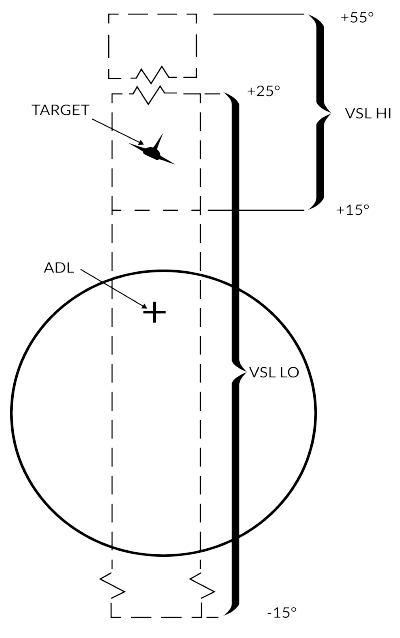
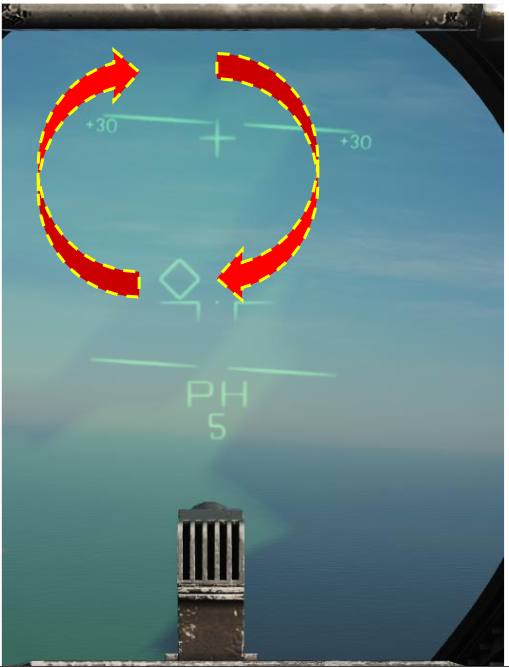
이것은 안테나가 5º 폭의 크기의 원형 방식으로 움직이도록 만든다. VSL HI를 선택하면 수직 영역은 +15º에서 +55º까지이고, VSL LO를 선택하면 -15º에서 +55º까지가 된다. VSL은 현재 위치를 표시하기 위해서 안테나의 시선과 함께 움직이는 마름모꼴로 HUD에 나타난다.
5NM 안에서 표적이 탐지될 때 레이더는 펄스 STT로 전환되고, 그렇지 않으면 다른 모드가 선택될 때까지 VSL이 계속 이어진다.
9.2.5.3. PAL (Pilot Automatic Lockon, 조종사 자동 락온) 모드
[298쪽]
PAL (조종사 자동 락온) 모드는 공대지 모드가 아닐 때 조종사가 표적 지정 스위치에서 DES 를 선택하는 것(스위치를 전방으로 누름)으로 활성화 된다.
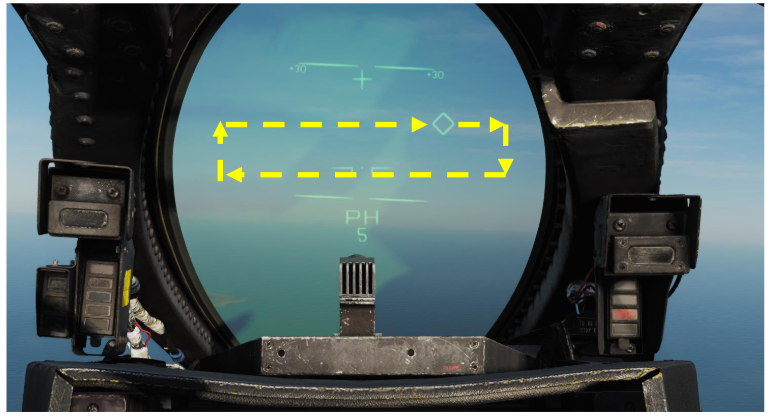
PAL 은 안테나가 8-bar ±20º 탐색 패턴으로 움직이게 하며, 15NM 거리까지 첫 번째로 탐지된 표적에게 고정(락)되도록 한다. 이 모드는 HUD 상에 현재 안테나의 시선을 따라다니는 마름모꼴로 표시된다.
9.2.5.4. MRL (Manual Rapid Lockon, 수동 신속 락온) 모드
[299쪽]

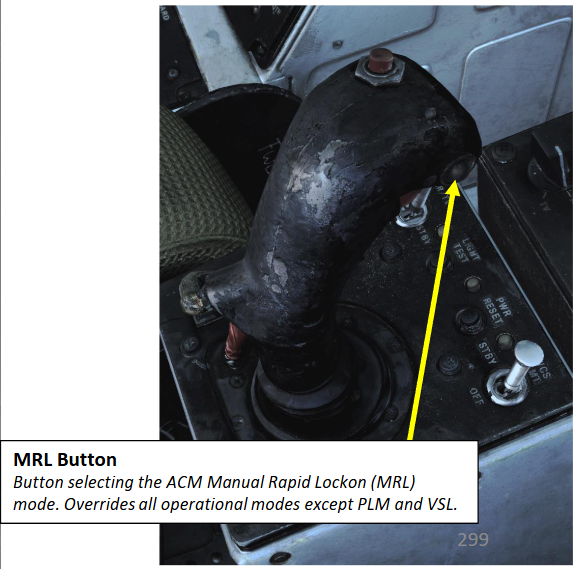
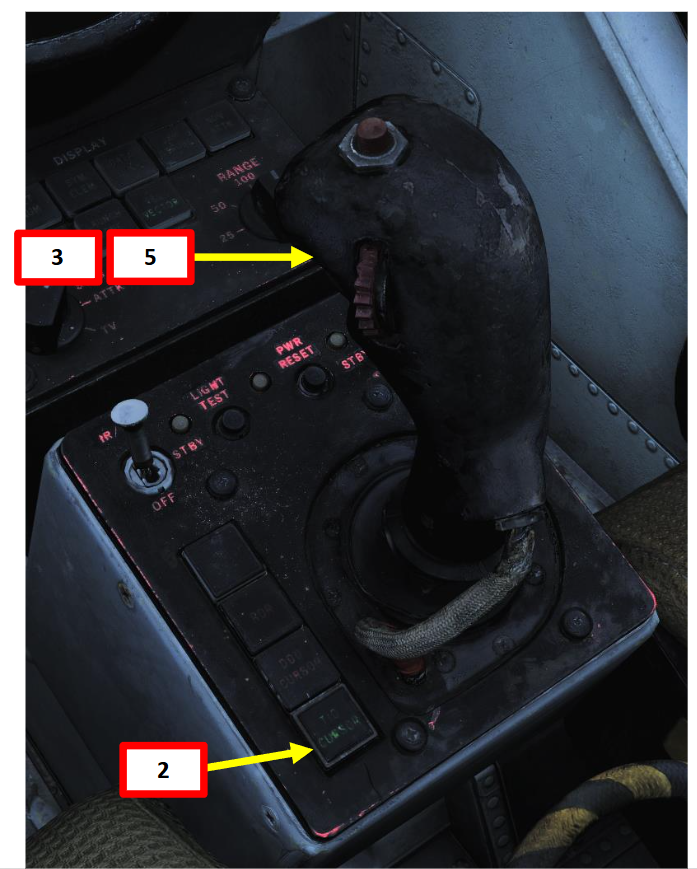
MRL 단추
ACM 수동 신속 락온 (MRL) 모드를 선택하는 단추. PLM과 VSL을 제외한 모든 운용 모드보다 우선시된다.
수동 신속 락온 모드는 5 NM 까지의 안테나 한계 안에서 표적을 빠르게 획득하기 위해 RIO가 활성화하는 모드이다. HCU 조종간 오른편에 MRL 단추를 누르면, 레이더가 5 NM 까지의 1-bar 초탐색(Supersearch) 패턴을 시작하게 된다.
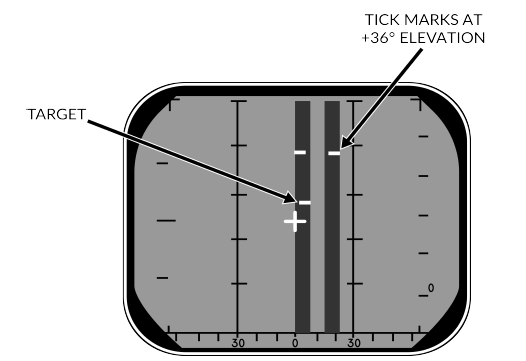
표적
상하각 +36º에 있는 Tick Mark
HCU 조종간은 방위각과 상하각 (왼쪽/오른쪽으로 방위각을 조절하고, 위/아래로 상하각을 조절한다.)에서 초탐색 패턴을 제어한다. DDD는 5 NM 범위의 초탐색 패턴을 보여주고, 추가로 현재 상하각을 나타내는 두 개의 Tick Mark를 스캔 패턴의 가장자리에 보여준다. 표적을 볼 수 있을 때 RIO는 full-action으로 표적을 힉득하고 펄스 STT로 전환한다.
MRL에 들어간 후에 half-action을 수행했다가 놓으면 레이더가 펄스 탐색 (Pulse Search)로 전환된다.
9.2.6. 제스터
[300쪽]





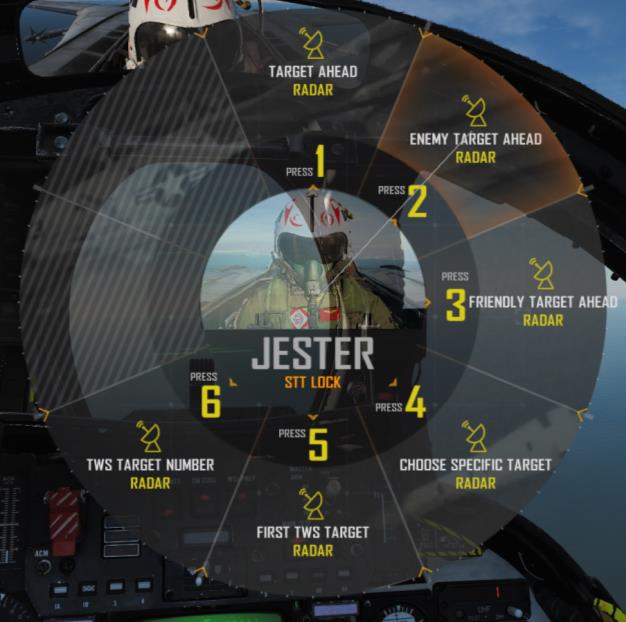
제스터에게 사용할 레이더 모드, 사용할 Scanning Parameter (스캔 한도), 누가 락온을 할지 선택을 요구할 수 있다. "A"를 누르고 "Beyond Visual Range Radar (BVR 레이더)" 메뉴 혹은 "Within Visual Range Radar (WVR 레이더) 메뉴를 선택한다.
제스터는 그가 발견한 접촉과 그것들이 어디있는지, 그들의 신원 확인 및 현재 항공기와 상대적인 방향을 역동적으로 말해줄 것이다.
9.2.7. 레이더 용어 & 전문 용어
[301쪽]
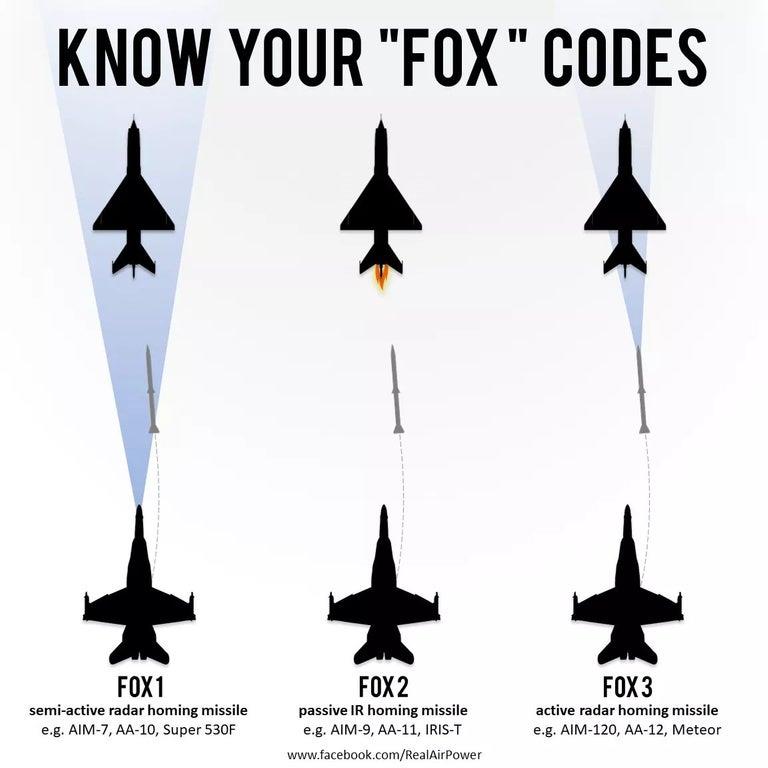
FOX 1 반능동 레이더 유도 미사일 (AIM-7, AA-10, Super 530F)
FOX 2 수동 IR 유도 미사일 (AIM-9, AA-11, IRIS-T)
FOX 3 능동 레이더 유도 미사일 (AIM-120, AA-12, Meteor)
● BANDIT: 식별된 적 항공기
● BOGEY: 미식별 항공기
● SPIKE: 자신이 공대공 레이더에 락온 됨.
● BUDDY SPIKE: 자신이 아군 레이더에 락온 됨.
● NAILS: 레이더 파동을 방사하지만 레이더에 자신이 락온되지는 않는 RWR 접촉.
● FOX 1: 반능동 레이더 미사일 (27R/ER, AIM-7)
● FOX 2: 열감지 적외선 미사일 (27T/ET, AIM-9, R-73/60)
● FOX 3: 능동 레이더 미사일. 특정 거리까지 항공기의 레이더를 추적하고 그 후에는 자신의 내장된 레이더를 활성화 (pitbull)하는 미사일. (AIM-54, R-77)
● RIFLE: AGM-65 공대지 미사일.
● RAYGUN: 표적을 레이더로 락온했을 때. "RAYGUN"이라고 말하는 것은 좋은 연습인데 그래야 편대원에게 자신이 누군가를 락온하고 있다는 것을 알릴 수 있다. 이는 주로 접촉을 피아식별하기 위해 사용된다. 만약 누군가 "BUDDY SPIKE!"라고 소리친 경우, 아군 접촉을 락온하고 있을 수도 있다.
● IFF: "상대가 아군인지 적인지?" (묻는 것)를 의미한다.
● PITBULL: 자체적으로 내장된 레이더를 사용하여 추적을 시작한 FOX 3 (능동 레이더) 미사일.
9.2.8. RIO BRA (Bearing Range Altitude) 호출
[302쪽]

RIO가 조종사와 레이더에 무엇을 보고 있는지 의사소통하는 것은 중요하다. 이것을 더욱 효율적으로 하기 위해서 RIO는 레이더에 뜬 아군, 미확인 혹은 적 표적의 "BRA" (Bearing-Range-Altitude, 방위각-거리-고도) 호출을 수행할 수 있다.
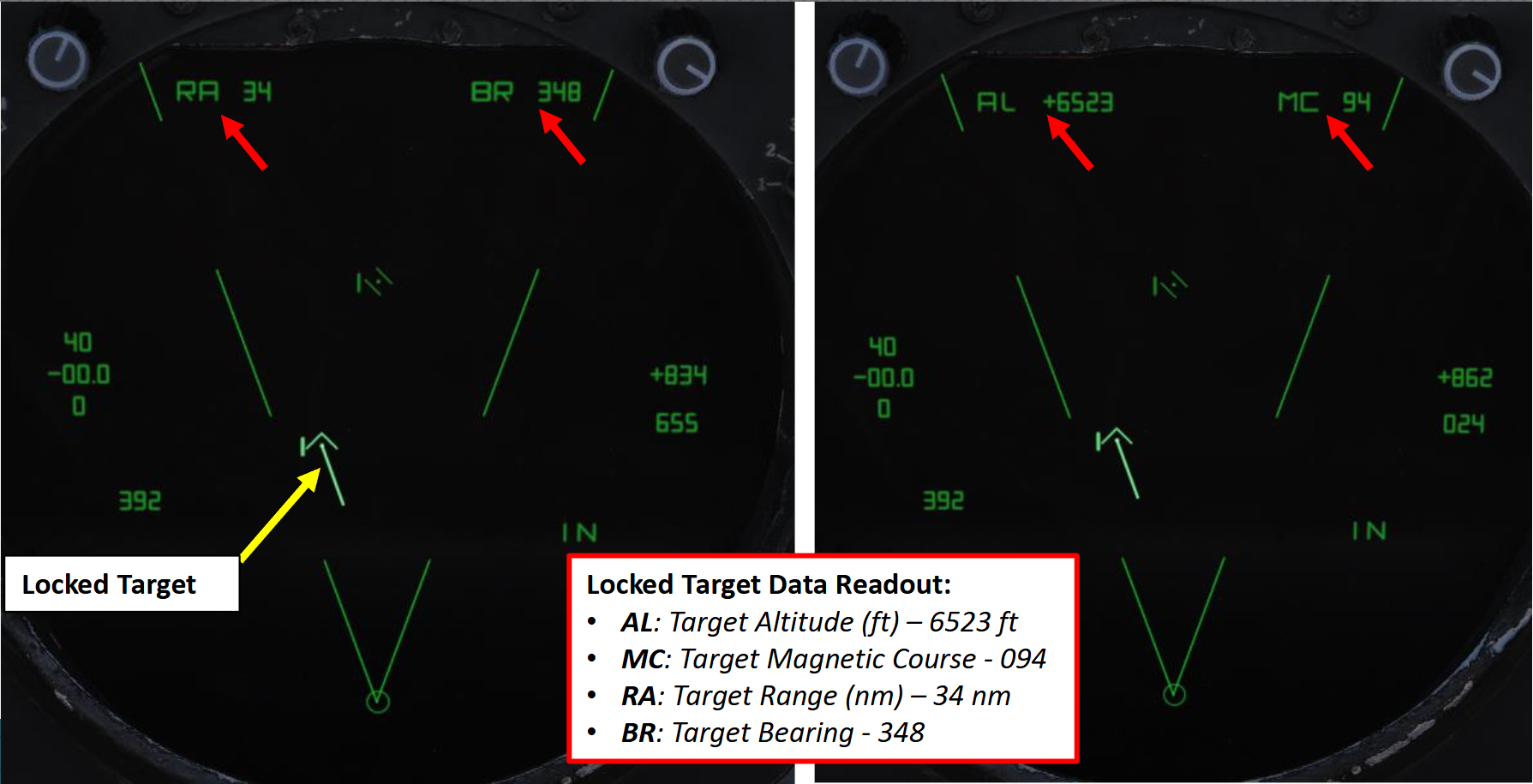
RIO가 TID에서 표적을 고르면 (Hooks up), 표적 정보값이 AL (Altitude, 고도), MC (Magnetic Course, 자침로), RA (Range, 거리), BR (Bearing, 방위각) 정보가 돌아가며 표시된다.
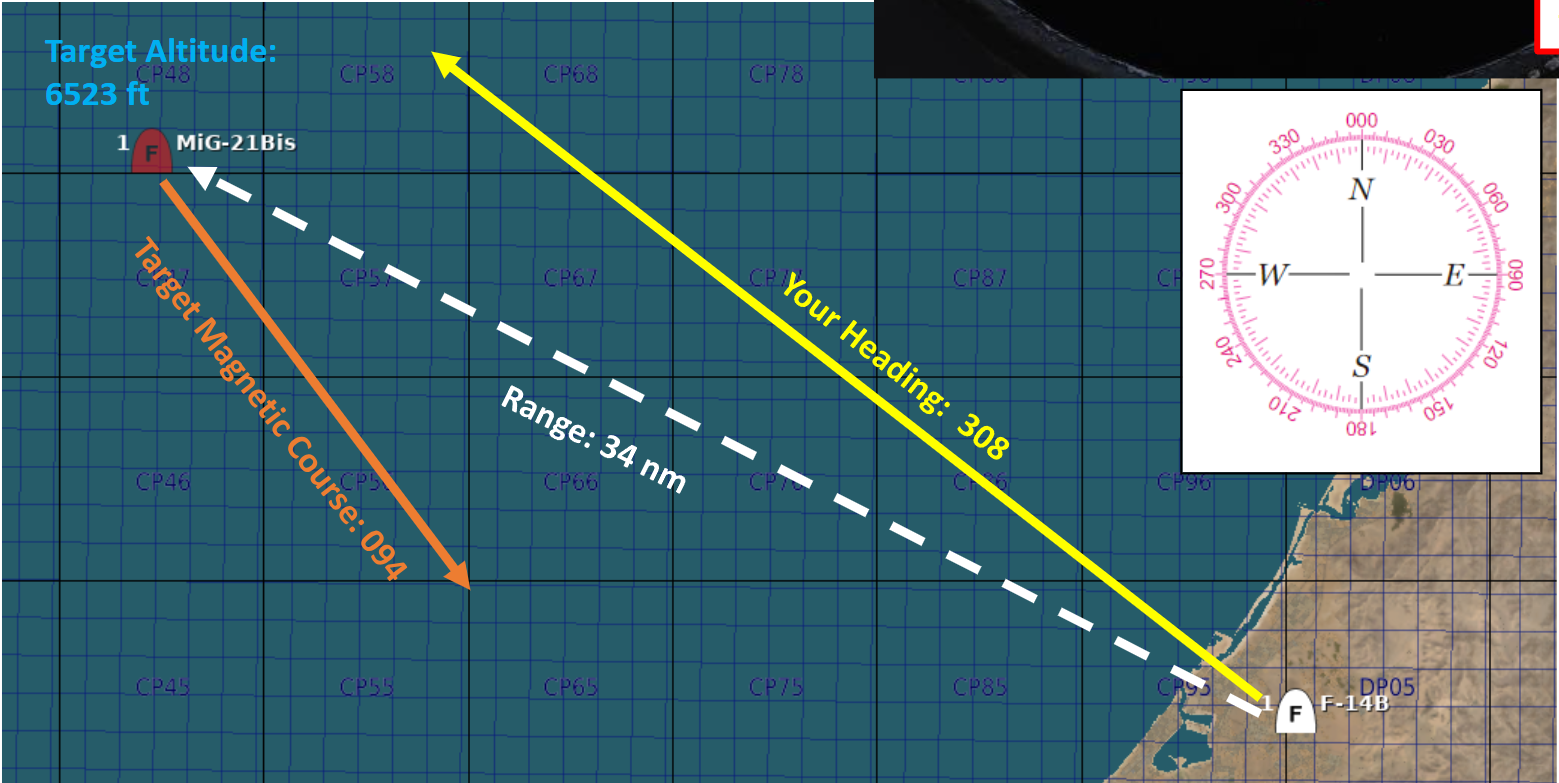
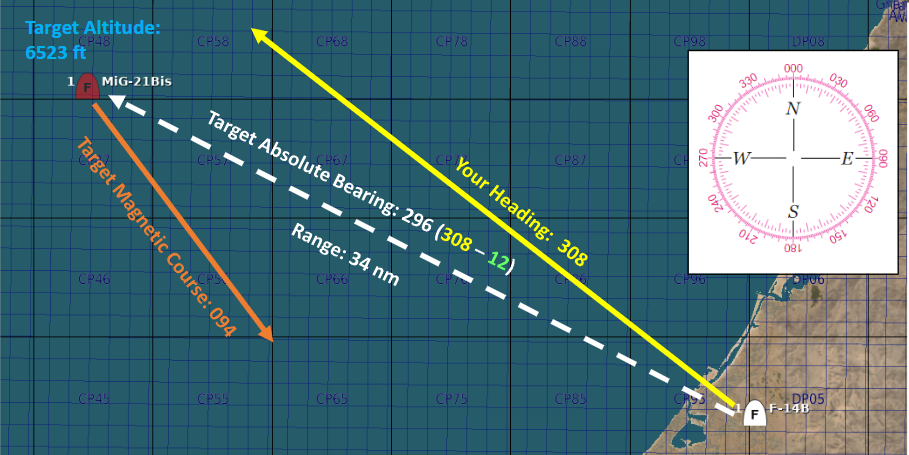
[303쪽]
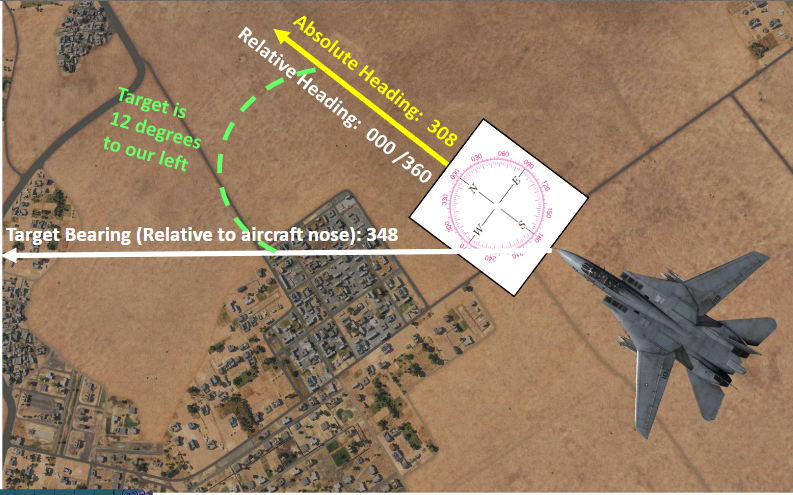
레이더에서 볼 수 있는 BR (방위각)은 사실 자신의 항공기 기수와 상대적인 방위각이다. (0 / 360 방위각). 예를 들어, BR 348 은 표적이 자신의 항공기 기수에서 348 방위각을 갖고 있음을 나타낸다. 간단히 말해서, 표적은 왼쪽으로 12º 벗어나있다는 것이다. 표적의 정확한 방위각을 얻기 위해서는 자신의 정확한 기수 방위 (308)을 가지고 자신의 기수와의 차이를 가감산한다. 이 경우에 표적의 진 방위각은 308-12=296 이다.
(역주: 즉, 자신의 기수를 360으로 보고 348 도의 방위각을 가진 적은 자신의 항공기 기준 왼쪽으로 12도 벗어나있다는 것이다. 자신이 향하는 방위각이 308 이니 왼쪽으로 12도 있는 표적은 296 도 방위각에 있는 것이다.)

RIO가 조종사에게 보내는 BRA (표적 방위각 거리 고도) 호출은 다음과 같이 들린다.
● "-Bandit, BRA, 296, 34 miles, angle 6.5."
자신의 항공기 기수와 상대적으로 표적을 언급할 수도 있다. (Bandit, 12 degrees left).
BRA (A) (Bearing Range Altitude Aspect, 방위각 거리 고도 각도)는 표적의 각도 (표적이 자신을 향하면 Hot, 표적이 멀어지면 Cold. 표적 자침로로부터 추론할 수 있다.) 호출은 다음과 같이 들린다.
● "-Bandit, BRA(A), 296, 34 miles, angle 6.5, hot."