
Heatblur DCS F-14 Tomcat — Heatblur F-14 Tomcat 1.0 documentation
© Copyright 2019, Heatblur Simulations
www.heatblur.se
DCS World, F-14 톰캣 Heatblur Manual 히트블러 메뉴얼
3-18 일반 설계와 체계의 개요
AN/AWG-9 무장 제어 체계 (WCS) ⑥
목차
● General Design and Systems Overview
○ AN/AWG-9 Weapon Control System (WCS)
■ AN/AWG-9 Radar
● 일반 설계와 체계의 개요
○ AN/AWG-9 무장 제어 체계 (WCS)
■ AN/AWG-9 레이더
F-14의 AN/AWG-9 레이더는 X-band (X-밴드는 8~12GHz)를 사용하는 전천후 (all-weather), 다중 모드 펄스 도플러 레이더이다. 이 레이더는 특히 탐색 중 추적 모드 (Track while Scan Mode)를 사용하여 AIM-54 피닉스 미사일을 6개까지 유도할 수 있는 장거리 레이더 시스템으로 설계되었다. 원래 예상했던 시나리오는 함대를 위협하는 러시아 폭격기와 공격기를 요격하는 장거리 함대 방공용이었다. F-14의 배치 후기에 이런 임무는 대전투기 쪽으로 더 많이 전환되었고, 이는 잘 적응 되었다.
AN/AWG-9 레이더는 두 개의 기본 운용 모드를 갖고 있다. 펄스와 펄스 도플러로 각각 장단점이 있다. 아래는 기능, 가용 무장, 기대 사거리와 사용 가능한 표적 자료를 나열한 표이다.
| 모드 Mode | 기능 Function | 가용 무장Weapons Capability | 탐지 사거리Detection-range | |
| 펄스 Pulse |
펄스 탐색 Pulse Search |
중거리 탐색과 탐지 (Search and Detection), 공대지 보조 (Secondary Air-to-Ground) |
기축선 미사일 (Boresight Missiles). |
60nm |
| 펄스 STT Pulse STT |
단중거리 단일 표적 추적과 미사일 발사 | 기총과 미사일, CW(연속파 Continuous Wave) 주사 AIM-7 과 활성화 AIM-54 발사. |
50nm | |
| 펄스 도플러 Pulse Doppler |
펄스 도플러 탐색 Pulse Doppler Search |
장거리 탐색과 탐지 | 기축선 미사일 | 110nm |
| 탐색 중 거리 측정 Range While Search |
장거리 탐색, 탐지, 거리 측정 | 90nm | ||
| 탐색 중 추적 Track While Search |
장거리 탐색, 탐지, 다중 표적 추적과 미사일 유도. | AIM-54, 다중 표적 능력. | 90nm | |
| 펄스 도플러 STT Pulse Doppler STT |
장거리 단일 표적 추적과 미사일 유도 | 기총과 모든 미사일. PD와 CW 주사 AIM-7과 PD와 활성화 AIM-54. |
90nm | |
쪽지
5m² 표적에 대한 탐지 범위 (Detection-range) 근사치
펄스 모드
펄스 모드 운용에서 AN/AWG-9은 펄스 도플러 여과(filtering)를 사용하지 않아 모든 각도에서 표적을 탐지할 수 있고 가장 기초적인(rudimentary) 지상 지형화 (ground mapping)도 할 수 있다. 장점을 보자면, 이 모드에서는 레이더가 표적을 등록하기 위해 상대속도를 이용할 필요가 없기 때문에 노치 (Notch, 레이더가 적기를 놓치는 것)되지 않는다. 하지만 단점은 레이더가 원치 않은 지상 반사와 실제 표적을 구별하는 가장 쉬운 방법을 가지지 않는다는 것이고, 이는 표적 항공기가 지상 가까이에서 지상 불필요 반사상 (ground clutter)에 숨을 수 있다는 것이다. 이것과 일반적인 배경 잡음에서 실제 항공기를 구별해내는 노력하는 것에서 어려움이 증가하기 때문이다.이것과 도플러 여과(doppler filtering)이 없어서 일반적인 배경 잡음으로부터 실제 표적을 구별하려는 노력의 증가 때문에 펄스 모드는 펄스 도플러 모드보다 사거리가 짧다.
(the increased difficulty from trying to differentiate 라고 쓰면 누가 알아 먹냐고 진짜. 자기네들 국어 아닌가. 국어 존나 못하네. 병신이야?)
레이더는 펄스 탐색과 펄스 단일 표적 추적 (PSTT)의 두 개의 펄스 모드를 갖고 있다.
펄스 탐색
SELECTIVE ERASE SWEEP = 선택적 소거 쓸기(갱신)
RANGE SWEEP = 범위 쓸기(갱신)
ALTITUDE RETURN = 고도 귀환
SEARCH (±10º SCAN) = 탐색 (±10º 조사)
펄스 탐색은 범위 내에서 공중의 표적을 찾고 발견하기 위해 사용된다.
기초적인 지상 지형화로 이 레이더 모드를 사용하는 것이 가능하고, 항법과 항법 수정을 위해서도 유용할 수 있고, 선박 같이 더 큰 지표면 표적을 탐지하기 위해서도 사용할 수 있다. 주요 기능으로써 레이더가 만들어지지 않았고 대지상 레이더가 이것을 쉽게 능가할 것이라는 것을 명심해야 한다.
이 모드에서 레이더는 그것만으로 표적을 구별해내지 못하고 항적 추적(track)도 생성할 수 없으므로 WCS가 추적 정보(track files)를 만들어내지 못하고 TID 상에 어떤 것도 표시하지 못할 것이다. 이것은 또한 펄스 탐색(Pulse Search)가 미사일을 유도하는 능력이 없다는 것을 의미한다.
이 모드에서 DDD는 선택한 축적에서 표적들의 방위각과 거리를 나타내는 레이더 영상을 표시하고, HCU 조종간으로 RDR 모드를 사용해 P STT로 이관하는 것이 가능하다. 감지기 제어반(Sensor Control Panel)에 있는 STAB 스위치를 사용하여 지상 혹은 항공기 안정 운용 모드(stabilized modes of operation)를 선택하는 것도 가능하다.
Pulse Single Target Track (P STT)
펄스 단일 표적 추적 (P STT)

AZ/EL STEERING SYMBOL = AZ(방위각)/EL(고도) 조향 기호
TARGET IMAGE = 표적상
MAXIMUM LAUNCH RANGE SYMBOL = 최대 발사 거리 기호
RANGE GATE (TRACKS TARGET) = 거리 게이트 (추적 대상)
- 거리 게이트
펄스 전파의 직진성ㆍ반사성 따위를 이용하여 멀리 있는 선박ㆍ항공기ㆍ비구름 따위의 목표물을 탐지하고 그 거리와 방향을 아는 레이더에서, 좁은 거리 범위 내의 반향(反響)을 선택하기 위하여 사용되는 게이트 회로.
CLOSING RATE SYMBOL = 접근 속도 기호
MINIMUM LAUNCH RANGE SYMBOL = 최소 발사 거리 기호
ALLOWABLE STEERING ERROR (ASE) CIRCLE = 허용 가능한 오차 원
- Allowable Steering Error (ASE) Circle 허용 가능한 오차 원
허용 가능 오차 원은 최적의 발사 상태 획득에 도움을 주는 확장 원이다. 원은 표적이 최적 발사 거리 안으로 가까워지면 확장하고, 최적 발사 거리 한계점보다 더 가까이 이동할 때 다시 줄어든다. ASE 원은 표적이 최대 발사 거리를 넘어서면 완전히 줄어든다.
ARTIFICIAL HORIZON = 인공 수평선
펄스 STT는 단일 표적 추적을 위해 사용되고, 펄스 탐색 모드처럼 노칭 (Notching, 레이더 회피)에 예민하지 않지만 지상 불필요 반사상에는 그렇다. STT모드가 속도를 이용하여 표적을 추적하는 사실은, 이 경우에 거리 게이트는, 지상 불필요 반사상에 덜 민감하지만, 지상과 충분히 가까워서 지상 반사가 거리 게이트에 들어오는 표적은 락(lock, 추적 대상 잠금)을 흔들 수 있다.
펄스 도플러 모드에서만 미사일 유도 명령을 전송할 수 있기 때문에, 펄스 STT는 CW (연속파) 주사 모드 AIM-7을 발사하는 것과 AIM-54 활성화 발사 모드로 제한된다. 그렇기에 사거리가 제한된다. 단거리, ACM 사거리에서 추적하기 위해 표적의 각도(aspect)를 설정하는 ASPECT 스위치를 사용하는 것이 가능하다. 이는 대응책의 다양한 유형에 대응하기 위함이다. 예를 들어, NOSE로 설정한다면 레이더가 표적 뒤에서 발사되는 채프로부터 멀어지는 표적의 항공기 앞 가장자리 (leading edge, Nose)에 가중치를 주기 때문에 레이더는 채프에 덜 민감해질 것이다.
성공적인 추적은 DDD 상의 ANT TRK와 RDROT 지시계 조명으로 나타내질 것이다. 이는 전파송수신기가 표적을 추적하고 있고 표적이 거리 게이트 안에 있다는 것을 의미한다. 만약 표적이 범위 추적 (range track)을 무효화하는 충분한 강도로 전파 방해를 한다면, 레이더는 전파 방해 각도 추적으로 이행할 것이고, 이는 RDROT 대신에 DDD상의 JAT 지시계 조명이 빛나는 것으로 표시된다. 범위 추적이 더 가까운 거리에서 다시 가능해질 때 레이더는 범위 추적으로 전환된다.
이 모드에서 DDD는 펄스 탐색 모드와 비슷할 것이다. 하지만 전파송수신기는 표적에게 고정될 것이고 조사를 하지 않을 것이다. 추가로 DDD는 표적 주변에 거리 게이트, 적절한 축척(right scale)의 접근 속도 기호 그리고 유효한 미사일이 선택되었다면 적용 가능한 공격 기호를 보여줄 것이다.
펄스 도플러 모드
펄스 도플러 모드에서 AN/AWG-9 은 도플러 여과기(filter)를 사용하여 원치않는 레이더 반사를 걸러내어 표적 탐지를 강화하고 탐지 범위를 늘린다. 이 모드의 장점은 표적을 보다 넓은 거리에서 탐지할 수 있고, 지상 반사가 거의 제거되며 AIM-7과 AIM-54 미사일에게 미사일 유도 명령을 보낸다. AIM-54는 TWS와 STT 둘 모두에서, 그리고 AIM-7은 STT에서만 가능하다. 이 모드의 가장 큰 단점은 상대 속도를 0으로 반사하는 표적은 걸러지게 되기 때문에 노칭(notching, 레이더 회피)에 민감하다는 것이다.
AN/AWG-9의 펄스 도플러 모드는 펄스 도플러 탐색(Pulse Doppler Search), 탐색 중 거리 측정(range while search), 조사 중 추적(Trach While Scan) 그리고 펄스 도플러 STT가 있다. 세 개의 탐색 모드는 공통의 DDD 화면을 가진다. 주요 차이점은 RWS와 TWS 두 모드가 추적되는 표적의 거리 표시를 활성화하기 위해 FM-범위를 처리 해야 하기 때문에 펄스 도플러 탐색이 조금 더 좋은 사거리를 가진다는 것이다.
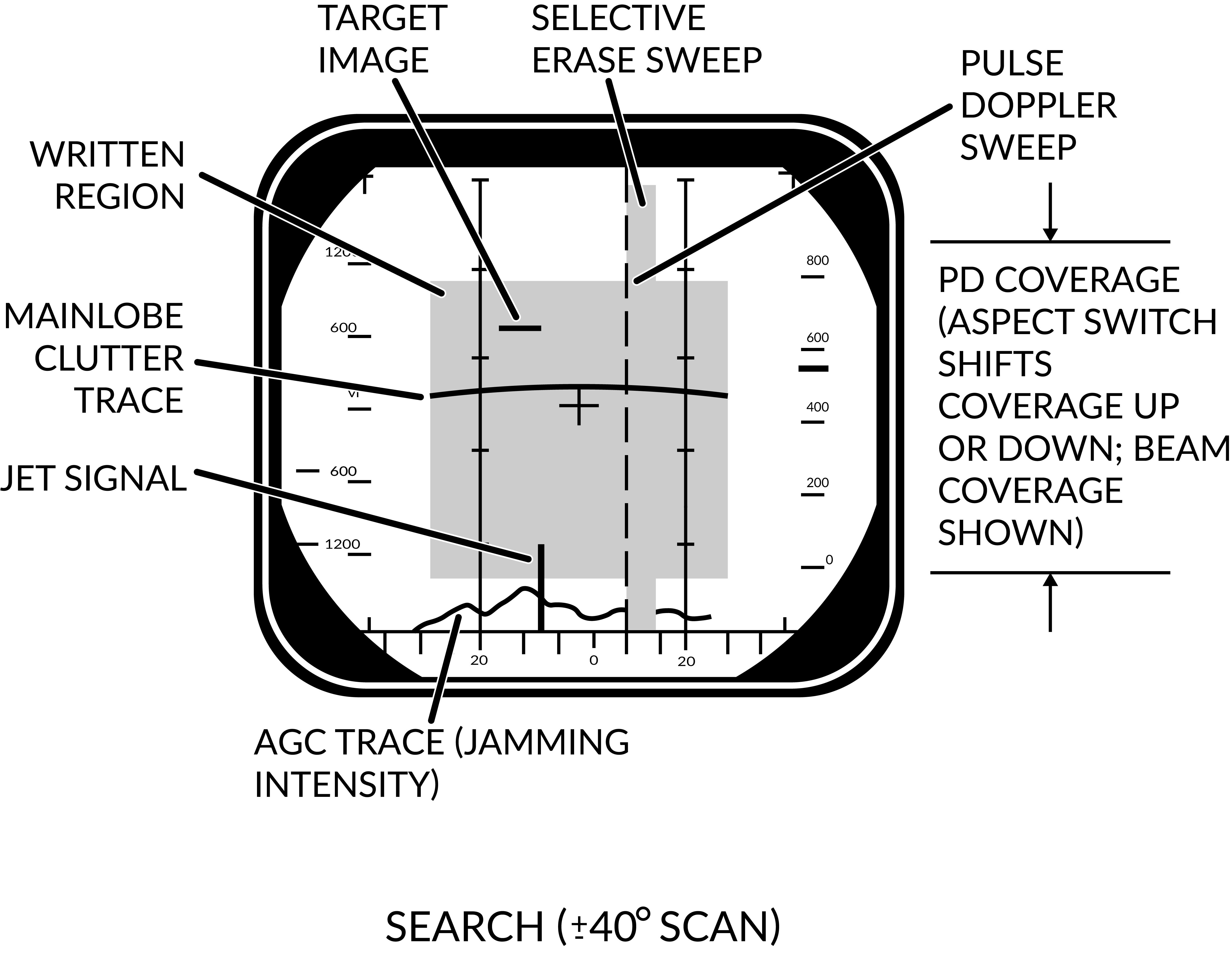
TARGET IMAGE = 표적상
SELECTIVE ERASE SWEEP = 선택적 소거 쓸기(갱신)
PULSE DOPPLER SWEEP = 펄스 도플러 쓸기(갱신)
PD COVERAGE (ASPECT SWITCH SHIFTS COVERAGE UP OR DOWN; BEAM COVERAGE SHOWN
= PD 적용 범위 (각도 스위치는 범위를 위 혹은 아래로 움직인다.; 빔 범위 표시)
AGC TRACE (JAMMING INTENSITY) = AGC 추적 (전파 방해 강도)
JET SIGNAL = 제트 신호
MAINLOBE CLUTTER TRACE = 주요 로브 불필요 반사파 추적
WRITTEN REGION = 표기 지역
펄스 도플러 탐색 모드에서 DDD는 방위각 대 속도 (접근 속도)에 따른 반사를 표시한다. 이는 DDD를 읽는 것만으로 RIO는 표적의 접근 속도와 방위각을 알 수 있다. 화면은 상대적 접근 속도와 대비하여 지면을 기준으로 하는 관측된 접근 속도(현재 항공기 속도를 뺀)를 나타낸다. 이는 바로 앞에, 레이더를 향해 곧장 움직이는 표적은 실제 표적 속도를 보여줄 것을 의미하지만, 이 속도는 표적의 각도(aspect)와 레이더 전파송수신기(antenna) 방위각에 의해 변한다. 이러한 이유는 레이더 자체가 상대적인 속도만을 읽고, 그 다음 DDD 화면에 표시하기 위해 자신의 속도를 빼서 수정하기 때문이다.
DDD 아래 가장자리에는 레이더 반사 강도를 나타내는 AGC-추적 (AGC-trace)이 표시된다. 이는 RIO가 전파를 방해하는 표적을 그것의 반사 세기로 파악할 수 있게 한다. 전파 방해를 하는 표적들은, 만약 그들이 전파 방해 한계점 설정(DDD에 있는 JAM/JET 손잡이으로 설정.)을 초과한다면 TID에 전파 방해 섬광(Jamming Strobe)으로 보여진다.
DDD에서 (속도 영역이 보여지는) 보여지는 눈금은 DDD 제어반의 Vc 스위치로 설정할 수 있다. X-4는 눈금을 800 노트 개방에서 4,000 노트 폐쇄로 설정한다. NORM은 눈금을 200 노트 개방에서 1,000 노트 폐쇄로 설정하고, VID는 눈금을 50 노트 개방에서 250 노트 폐쇄로 설정한다. 도플러 여과기(filter)의 운용 거리는 같은 제어반의 ASPECT 스위치로 설정될 수도 있다. NOSE는 600 노트 개방에서 1,800 노트 폐쇄로 설정한다. BEAM은 1,200 노트 폐쇄에서 1,200 노트 개방으로 설정하고, TAIL은 1,800 노트 개방에서 600 노트 폐쇄로 설정한다. 이는 RIO가 알고 있는 표적의 접근 속도에 도플러 여과기를 최적화할 수 있고, 이는 DDD에만 영향을 미치는 Vc 스위치와는 다르게 모든 레이더 처리에 영향을 미친다.
(도플러 필터를 조절하여 원하는 접근 속도의 표적만을 걸러낼 수 있기 위함이다. 200노트 개방, 1000노트 폐쇄라 한다면 200 노트에서 1000 노트 사이의 반사만을 받아들여서 접근 속도가 해당 영역 안에 있는 표적을 레이더에 표시한다.)
레이더가 도플러 여과기를 운용하는 방식 때문에 두 개의 불감不感거리(blind range)를 가진다. 지상 속도가 0인 반사를 포함하여 대부분의 지상 반사를 갖는 주엽(main lobe) 불필요 반사파 (MLC) 영역은 현재 항공기 지상 속도를 중심으로 266 노트 폭을 가진다. (133 노트보다 느리고 133 노트보다 빠름.) 지면은 걸러지기 때문에 상대적으로 지상 속도와 똑같은 속도를 갖는 표적이 레이더를 회피할 수 있게 되는 이유이다. 하지만 이것은 오직 내려보기(룩-다운, Look-down) 상황에서만 해당된다. 레이더 전파송수신기가 하늘로 올려다 볼 때 이 여과기는 불필요하므로 끌 수 있기 때문이다. 만약 DDD 제어반의 MLC 스위치가 AUTO에 있다면 레이더는 수평선보다 위로 3도 이상을 바라보는 경우에 자동으로 MLC 여과기를 끌 것이다. 이는 RIO가 수동으로 끌 수도 있다. 하지만 만약 전파송수신기가 아래를 본다면 이것은 지상의 모든 반사가 추적을 위한 컴퓨터에게 보내질 것이기 때문에 RWS와 TWS에서 화면을 사용할 수 없게 만든다. 어느 쪽이든 MLC 여과기가 꺼진 상태에서 표적이 레이더 위에 있을 경우 AN/AWG-9의 레이더를 회피할 수 없다.
레이더의 두 번째 여과기, 그리고 두 번째 맹점은 0 도플러 여과기이다. 이 사각지대는 현재 음수 지상 속도의 접근 속도를 중심으로 한다. 즉, 현재 항공기로부터 멀어지는 표적이 현재 항공기와 똑같은 속도임을 의미한다. 도플러 이동(Doppler Shift) 없이는 표적을 탐지할 수 없는 도플러 레이더 모드 때문에 이 사각 지대는 물리적 장비의 한계점이다. 그 결과 사각 지대는 200 노트 폭이다. 즉, 자체 지상 속도의 100 노트 (+/-) 안의 속도로 움직이는, 추적되는 표적은 레이더에 보이지 않을 것이다. 이는 도망치는 표적을 쫓고 있을 때 펄스 모드를 대신 쓰는 것이 필연적으로 더 좋을 수 있다는 것을 의미한다.
두 개의 여과기는 방위각에 따라 다르고, 표적과 상대적인 현재 속도는 측면각에 따라 다르다. 45º 표적으로부터의 상대 속도는 0º에서의 표적보다 적을 것이다. 현재 속도의 방향(Vector)이 조금 떨어진 곳을 향하게 되기 때문이다. 주엽 불필요 반사파 추적이 DDD에서 곡선으로 나타나는 이유이다. 이는 반사되는 지상 반사의 관측 속도가 방위각에 따라 다르기 때문이다.
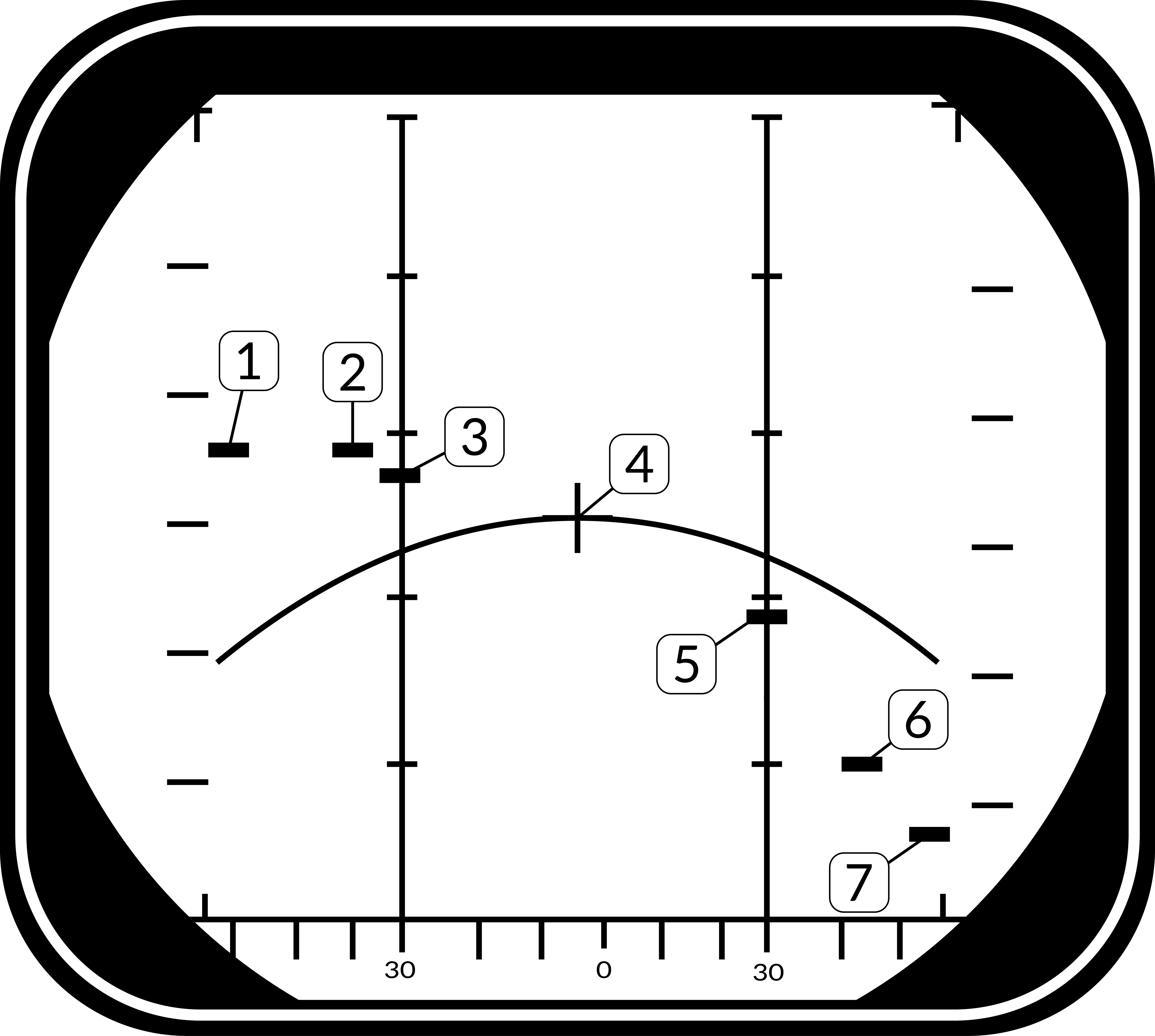
표적 지상 속도 900노트, 현재 항공기 속도 1200 노트.
자세한 정보는 아래의 표를 참고.
속도 가시선은 표적과 현재 항공기 상대 속도의 합이다.
| Look Angle | Line of Sight Rate | Target Heading | |
| 1 | 60º | 1490 | 180º |
| 2 | 45º | 1500 | 120º |
| 3 | 30º | 1428 | 100º |
| 4 | 0º | 1200 | 90º |
| 5 | 30º | 672 | 80º |
| 6 | 45º | 210 | 60º |
| 7 | 60º | -300 | 0º |
쪽지
4번 위치는 MLC 여과기 혹은 MLC 지상 반사 안에서 사라지게 만드는 측면 혹은 "notching" (레이더 회피하는) 위치에서의 표적을 갖는다. 올려다보는 상황에서 MLC 여과기 비활성한다면 표적이 여전히 보이게 될 것이다.
추가로 모든 펄스 도플러 탐색 모드는 독점적인 지상 안정화를 사용한다. 그러므로 STAB 스위치는 운용하지 않는다.
펄스 도플러 탐색
펄스 도플러 탐색 모드는 주로 조기 경보 모드의 일종으로 사용된다. 이것은 광범위 탐지를 하는 탐색 모드이지만 RIO에게 거리는 표시해주지 않고, 오직 접근 속도만 표시해준다. 이런 이유로 TID는 항적 정보를 표시하지 않는다.
탐색 중 거리 측정
탐색 중 거리 측정에서는 거리를 측정하는 주파수가 추가된다. (FM 거리 측정) 이는 레이더가 추적되는 표적의 접근 속도뿐 아니라 거리 측정도 할 수 있다. 하지만 이 추가 처리는 레이더의 유효 범위가 다소 작다는 것을 의미한다. DDD의 화면은 펄스 도플러 탐색에서와 똑같지만, TID는 이 모드에서 표적으로 보여지는 항적들을 그들이 조사(scan)되는 대로 잠깐동안 보여주어 항적들(tracks)도 보여주고 그들의 위치와 고도를 나타낸다. 표적은 최대 2초 동안 보여지거나 전파송수신기가 다시 같은 막대(Radar Bar, 영역)를 같은 방위에서 조사할 때까지 표시되고, 이때 다시 탐지되지 않는다면 사라진다. 동시에 보여지는 최대 항적의 수는 48개이다.
탐색 중 추적
탐색 중 추적 모드는 RWS과 똑같은 FM 거리 측정을 사용한다. 이는 펄스 도플러 탐색과 비교하여 사거리 측면에서 똑같은 축척을 갖는다. DDD 화면 또한 똑같다. 주요 차이점은 컴퓨터가 항적 정보를 형성하고, 24개까지 표적을 동시에 추적하며 이 중 18개는 TID에 표시될 수 있다는 것이다.
이러한 항적들을 계산하는 컴퓨터 반복 작업은 2초의 추적 새로고침 시간 설정이 필요하다. 이는 방위각 조사 영역과 중첩영역(Bar) 설정을 20º 4개 영역 또는 40º 2개 영역 중 하나로 제한한다. TWS에 들어갈 때 컴퓨터는 RIO가 설정한 조사량(Scan Volume)을 무시하고 자동적으로 ±20º 4개 영역(Bar) 조사를 선택한다. 만약 ±40º 2개 영역으로 설정이라면 그것이 대신 사용된다.
TWS 모드는 또한 (6개까지) 다중 표적 AIM-54의 유도가 가능한 유일한 모드이다. 그리고 탐지된 표적과 교전할 수 있게 되자마자 컴퓨터는 표적들에게 최적의 미사일 발사 절차를 따라 미사일 우선 순위 번호를 배정하기 시작한다. TWS는 두 개의 부차 모드를 이용 가능한데 TWS 자동(Auto)와 TWS 수동(Manual)이다. 이는 RIO가 DDD 제어반의 해당 단추로 선택한다. 둘 사이의 다른 점은 TWS 자동에서 컴퓨터는, 사용 중인 조사량과 조사 방법 및 고도의 제어를 대상 항적(Target Tracks)이 나타나자마자 가져간다. WCS 컴퓨터는 자동으로 조사량과 방향을 최적화하려고 시도하며, 우선 순위가 매겨진 표적의 추적을 최대화 한다. 발사 전에 선택되지 않았다면 WCS는 첫 번째 AIM-54가 발사되자마자 무시하고, TWS 자동을 선택한다.
TWS에서 조종사는 항법 신호를 통해 컴퓨터 계산 하에서 추적 중인 표적 중심을 향해 유도된다. 이 중심은 TID에서도 작은 X 모양의 교차로 표시된다.
TWS 기호와 미사일 유도에 대한 자세한 정보는 TWS (TWS)와 TID 기호 (TID Symbology)를 참고.
Pulse Doppler Single Target Track (PD STT)
펄스 도플러 단일 대상 추적 (PD STT)
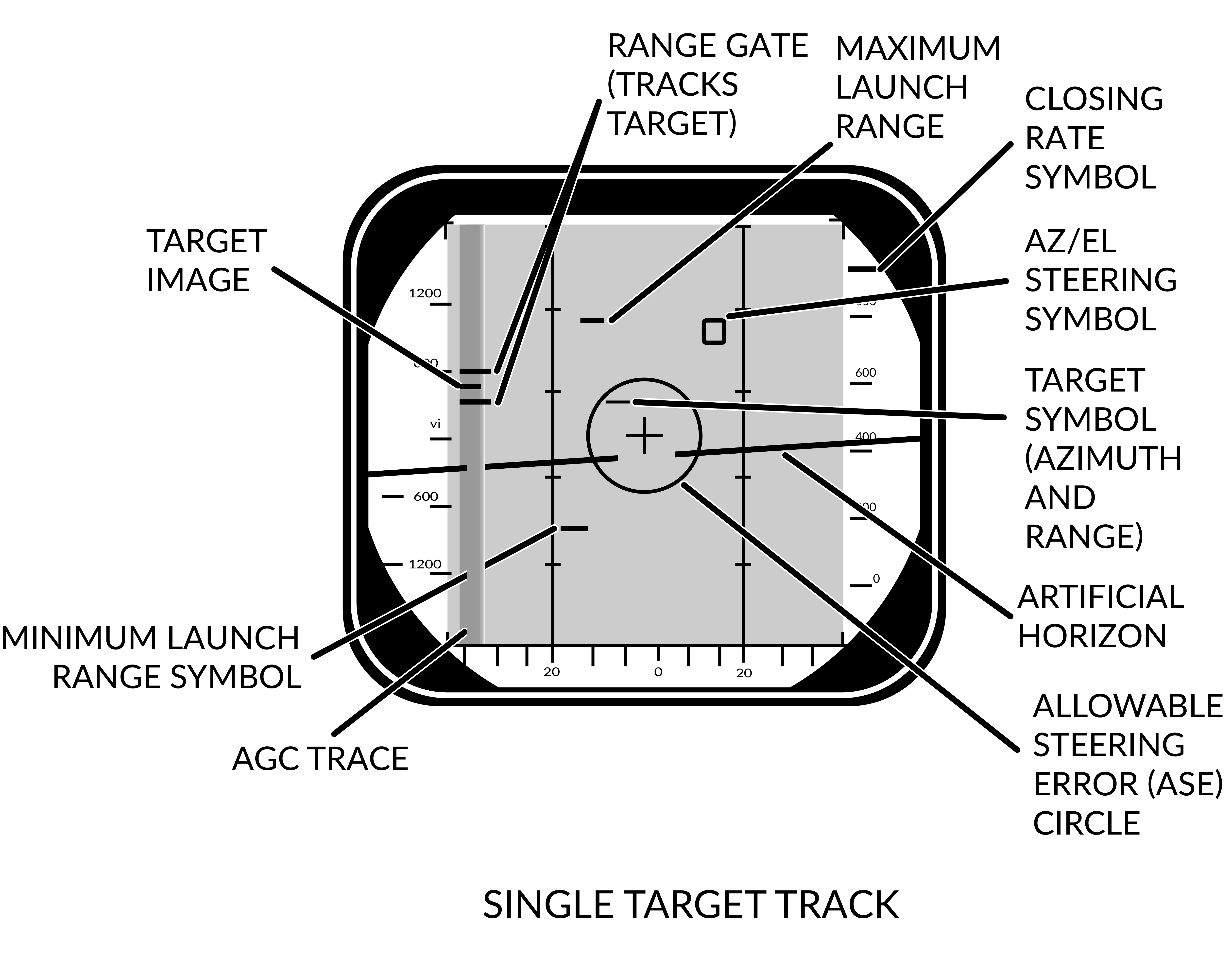
RANGE GATE (TRACKS TARGET) = 거리 게이트 (추적 대상)
MAXIMUM LAUNCH RANGE = 최대 발사 거리
CLOSING RATE SYMBOL = 접근 속도 기호
AZ / EL STEERING SYMBOL = AZ(방위각) / EL(고도) 조향 기호
TARGET SYMBOL (AZIMUTH AND RANGE) = 표적 기호 (방위각과 거리)
ARTIFICIAL HORIZON = 인공 수평선
ALLOWABLE STEERING ERROR (ASE) CIRCLE = 허용 가능한 오차 원
AGC TRACE = AGC 추적
MINIMUM LAUNCH RANGE SYMBOL = 최소 발사 거리 기호
TARGET IMAGE = 표적상
펄스 도플러 STT는 펄스 STT모드처럼 보이며 일한다. 하지만 이것은 펄스 STT와 비교하여, 다른 펄스 도플러 모드가 펄스 모드와 비교할 때와 똑같은 장점과 단점을 갖는다. 이는 지상과 가까운 표적을 추적하는 데에서 더 좋은 반면에 Notching (레이더 회피)에 취약하다는 것을 의미한다.
펄스 도플러 STT의 DDD 화면은 펄스 STT 화면처럼 보인다. 화면의 왼쪽에서 움직이는 표적 반사와 전파송수신기 방위각 표시, 그리고 생성된 합성 대상 표기(a Generated Synthetic Target Marker)가 옳은 방위각에서 대신 보여진다는 것을 제외하면. 이는 접근 속도만 보여주는 다른 펄스 도플러 모드와 다르게 표적 거리가 합성 표적(Synthetic Target)으로 표시될 수 있다는 것이다. 이 모드에서 DDD 상의 다른 기호는 펄스 STT에서와 똑같다.
하지만 펄스 STT에서와 다르게 펄스 도플러 STT에서는 AN/AWG-9이 미사일 유도 명령을 보낼 수 있어서 AIM-7과 AIM-54를 펄스 도플러 모드로 발사할 수 있다. 이 모드는 이 미사일들의 가장 긴 발사 거리를 가지는 모드이고, AIM-54의 경우 한 번에 하나의 표적과만 교전할 수 있는 단점을 가지고 있다.
이행(移行) 모드
이행 모드는 TCS 혹은 두 개의 STT 모드를 통하여 탐색 모드 (Search Modes), ACM 모드에서 단일 대상 추적으로 이행하기 위해 사용하는 모드이다.
레이더 모드에서 HCU 조종간
다양한 탐색 모드에서 AN/AWG-9 레이더를 사용할 때, 선택된 레이더 모드에서 HCU 조종간을 이용하여 수동으로 DDD 상에서 STT lock을 할 표적을 선택할 수 있다.
레이더 모드 도중에 HCU 방아쇠를 Half-Action으로 누르는 것은 획득 게이트 (Acquistion Gate)를 DDD 상에 표시하고, 해당 레이더에서 초탐색(SuperSearch) 모드를 활성화한다. 초탐색 모드에서 전파송수신기는 획득 게이트 주변에서 선택된 레이더 막대(Radar Bar)의 양으로 ±10º 탐색 방법을 행한다.
이때 획득 게이트는 HCU로 표적의 탐지된 위치 너머로 조향하는 것이 가능하다. 좌/우는 방위각을 조종하기 위해 사용하고, 펄스인지 펄스 도플러를 사용 중인지에 따라 위/아래는 거리 혹은 속도를 조종하기 위해 사용한다. 그 후, 전파송수신기 고도는 표적 반사가 획득 게이트 안에서 보이게 될 때까지 HCU에 있는 고도 부척(Elevation Vernier)을 사용하여 미세 조정된다. 그러면 RIO는 이때 HCU 방아쇠의 Full-Action을 선택하여 레이더가 명령된 방위각, 거리/속도와 고도에서 락온(lcokon)을 시도하도록 명령한다.
그 다음 성공적으로 수행된 레이더라면, STT 모드로 이행(Transition)하고, DDD에서 올바른 지시계가 빛이 난다. 펄스 탐색(Pulse Search)에서 이행 중이라면 펄스 STT가 사용되고, 어떤 펄스 도플러 탐색 모드에서든의 이행은 펄스 도플러 STT이 사용된다.
TWS STT 획득
TWS에서 STT 락온을 시도할 수 있다. TID상의 표적을 갈고리질(Hooking)한 다음 DDD 제어반에서 펄스 STT나 펄스 도플러 STT를 선택하는 것이다. 그 후, WCS 컴퓨터는 초탐색 중인 전파송수신기에 획득한(Hooked) 항적의 방위각, 거리/속도와 고도를 명령하고, 표적이 탐지되면 락온을 시도한다.
수동 HCU 획득에서와 다르게 이 과정은 완벽하게 자동화되어있다. 하지만 이것의 성공률은 수동 이행보다 낮다.
ACM 모드
AN/AWG-9 은 세 가지의 뚜렷한 차이가 있는 ACM 획득 모드를 갖고 있다. 조종사 락온 모드 (Pilot Lockon Mode, PLM), 수직 조사 락온 (Vertical Scan Lockon, VSL) 그리고 수동 신속 락온 (Manual Rapid Lockon, MRL)이다.
ACM 모드는 우선 순위를 목록화한다. 우선 순위가 낮은 모드는 다른 모드에 무시된다. 이는 PLM이 항상 VSL과 더 낮은 모드를 무시하고, VSL은 PAL과 더 낮은 모드를 무시하지만 PLM과 기타 등등에는 그렇지 않는다.
모든 모드는 RIO가 HCU에서 Half-Action과 놓는 것(release)으로 종료될 수 있다. 조종사가 PLM 단추를 놓을 때까지 효력을 갖게 되는 PLM은 제외한다.
조종사 락온 모드
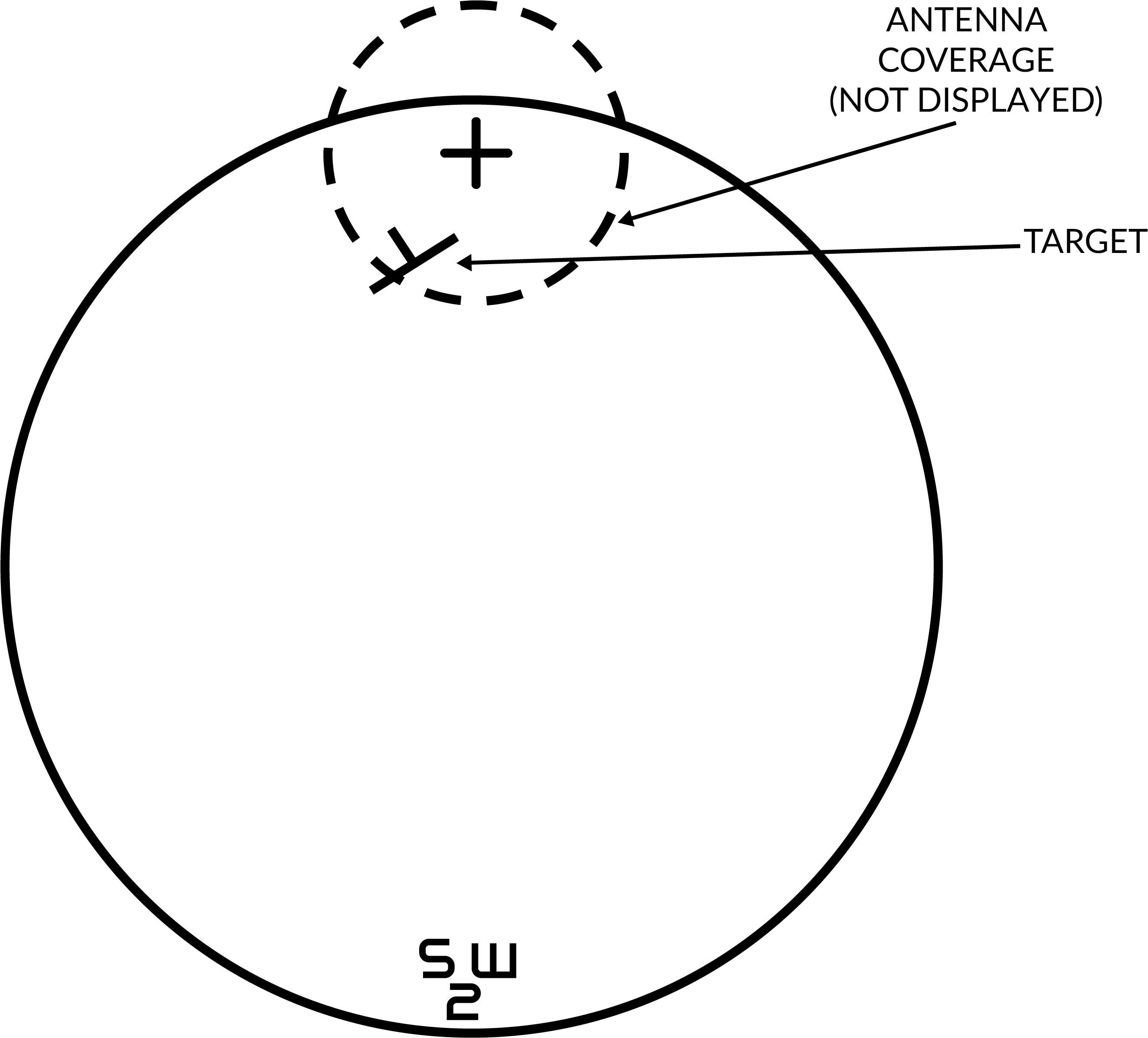
ANTENNA COVERAGE (NOT DISPLAYED) = 전파송수신기 범위 (표시되지 않음)
TARGET = 표적
PLM은 가장 높은 우선 순위를 갖는 ACM모드이다. 이 모드는 항상 다른 레이더 모드를 무시하고, 조종사가 오른쪽 쓰로틀 앞에 있는 PLM 단추를 누를 때 활성화된다. 그 단추를 누르는 것은 전파송수신기를 무장 기준선 (Armament Datum Line, ADL)으로 (향하도록) 명령하고, 5해리(NM) 내에서 보여지는 첫 번째 표적에게 락(lock) 되도록 한다.
그러므로 PLM을 사용하는 절차는 조종사가 HUD의 ADL 표시가 표적 위에 오도록 비행하고 난 뒤 락온될 때까지 PLM 단추를 누르고 있는 것이다. PLM은 표적이 탐지되고 펄스 STT로 전환 될 때까지, 혹은 PLM 단추가 놓아지고 레이더가 펄스 탐색으로 전환될 때까지 계속된다.
수직 조사 락온 (VSL)
VSL 모드는 조종사 혹은 RIO가 활성화하고, 현재 항공기 진행 방향의 -15º에서 +55º 고도에서 표적을 획득하기 위해 사용된다. RIO는 감지기 제어반 (Sensor Control Panel)의 VSL 스위치를 사용할 수 있다. 두 개의 부차적인 모드는 스위치를 VSL HI (high) 혹은 VSL LO (low)에 놓는 것으로 이용할 수 있고, 중앙에 두는 것으로 되돌릴 수 있다. 조종사는 A/G모드가 아닐 때 표적 지정 스위치(Target Designate Switch)를 각각 UP이나 DN을 선택하는 것으로 VSL HI 혹은 LO를 활성화할 수 있다.
이것은 전파송수신기에게 5º 너비의 양을 원형으로 탐색하도록 명령한다. VSL HI 이라면 +15º에서 +55º가 포함되는 수직 영역이고, VSL LO 라면 -15º에서 +25º가 포함된다. VSL은 전파송수신기의 시선(line of sight)에 따라 움직여서 현재 위치를 나타내는 마름모꼴로 HUD에 표시된다.
표적이 5 NM 안에서 탐지될 때 레이더는 펄스 STT로 전환하고, 그렇지 않다면 다른 모드가 선택될 때까지 VSL 모드가 계속된다.
조종사 자동 락온 (PAL)
PAL은 A/G모드가 아닐 때 조종사가 표적 지정 스위치의 DES를 선택하는 것으로 활성화된다.
PAL은 전파송수신기에게 15 NM 밖까지 첫 번째로 탐지된 표적을 고정하는 8-막대 (8-bar) ±20º 조사 방식을 명령한다. 이 모드는 HUD 상에서 전파송수신기의 현재 시선을 따르는 마름모꼴로 표시된다.
수동 신속 락온 (MRL)
TICK MARKS AT +36º ELEVATION = 36º 고도를 나타내는 표시
수동 신속 락온 (MRL) 모드는 RIO가 전파송수신기 5 NM까지인 한계 안에서 신속하게 표적을 획득할 수 있게 한다. HCU 조종간 오른쪽에 있는 MRL 단추가 눌려졌을 때, 레이더가 5 NM까지 1-막대 초탐색 양식 (One-bar Supersearch pattern)을 시작하도록 명령한다.
HCU 조종간은 방위각과 고도에서 (방위각을 제어하는 좌/우와 고도를 제어하는 상/하) 초탐색 양식을 제어한다. DDD는 5 NM 범위 안에서 보통의 초탐색 양식을 나타내고, 추가로 두 개의 표시 (Tick Mark)가 현재 고도를 나타내는 조사 양식의 가장자리에 보여진다.
표적이 보여질 때, RIO는 표적을 획득하고, 펄스 STT로 전환하기 위해 (HCU 조종간 방아쇠를) full-action 한다. half-action만 하게 된다면 MRL로 들어가고, 놓을 때 레이더 이행을 펄스 탐색으로 되돌린다.
TCS 종속 레이더 획득
TCS는 레이더를 사용하여 거리와 범위를 측정하는 동안에 목표를 추적하는 데 사용할 수 있다. 감지기 제어반 (sensor control panel)를 통해 (RDR 위치를 SLAVE에 위치) 레이더를 TCS 시선에 종속되도록 선택할 때, 레이더는 여전히 활성화될 것이지만 TCS가 조사가 아닌 추적을 활성화 하는 동안에 TCS 시선의 방향을 향한다.
이 상태에서 half-action을 한 다음 표적 영상 (target video)에 획득 게이트 위치하고, 그 후 full-action을 하는 것이 가능하다. 이는 이전 레이더 모드에 따라 펄스 도플러 종속 혹은 펄스 종속 모드가 될 것이다. 또한 DDD 제어반의 P STT와 PD STT 단추를 사용하여 바꾸는 것도 가능하다.
부차적인 모드(submode)로 들어가는 결과는 레이더 자체가 아닌 TCS를 사용하여 표적 각도를 추적하는 STT 모드와 동일하다. 레이더는 여전히 거리와 범위를 추적하기 위해 사용되고, DDD에서는 IROT 조명이 ANT ROT 대신에 사용된다. IR 추적과 연관된 IROT는 구현된 F-14 형식에서는 TCS로 대체되었다.
(원문: The resulting submode entered is equivalent to an STT mode where the TCS is instead used to track the targets angle rather than the radar itself. The radar is still used to track range and rate, on the DDD the IROT lights instead of the ANT ROT, IROT relating to ir tracking which has been replaced by the TCS in the modelled F-14 versions.)
이 모드는 미사일을 유도를 위해 사용할 수 있고, 펄스 그리고 펄스 도플러 모드에서는 활성화와 CW 모드를 사용할 수도 있다. 이 모드에서 SLAVE 스위치가 INDEP로 설정되어있다면 체계(system)는 현재 모드에 따라 정확한 펄스 STT 혹은 펄스 도플러 STT로 되돌아간다.
Transition Between the Two STT Modes
두 STT모드 사이에서 이행
필요하다면 해당하는 단추를 누르는 것으로 펄스 STT와 펄스 도플러 STT 사이에서 이행하는 것도 가능하다. 만약 이행이 실패한다면 레이더는 STT 모드가 명령된 각각의 탐색 모드로 되돌아간다. (만약 펄스 STT가 선택되었다면 펄스 탐색으로, 반대도 마찬가지이다.)
탐색으로 회귀 이행
RIO가 탐색 모드로 회귀 위행을 원한다면, half-action하고 놓는 것으로 레이더를 펄스 STT에서는 펄스 탐색으로, 펄스 도플러 STT에서는 펄스 도플러 탐색으로 되돌릴 수 있다.
만약 레이더가 STT에서 표적 잠금(lock)를 놓치고, 레이더가 그것을 다시 획득하지 못한다면 RIO가 half-action을 통해 수동으로 이행할 때 각각의 탐색 모드로 되돌아간다.
VSL과 MRL은 또한 같은 방식으로 초기화하고 탐색으로 되돌리는 것이 가능하다. 하지만 PLM이 우선되기 때문에 PLM을 해제하기 위한 유일한 방법은 표적을 락온하고 펄스 STT로 이행하는 것 혹은 레이더가 펄스 탐색으로 되돌아가도록 조종사가 PLM을 다시 선택하는 것이다.